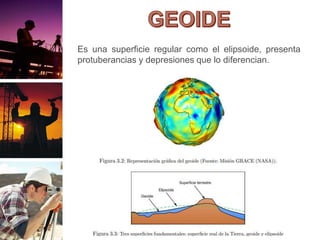
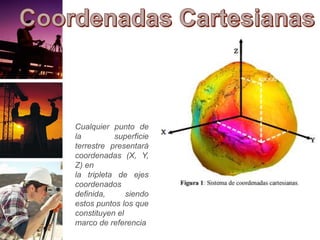
1) El documento trata sobre el curso de geodesia impartido por el Ingeniero Jorge Sánchez. 2) Se describen los sistemas de información geográfica, marcos de referencia, coordenadas y proyecciones cartográficas. 3) También se explican conceptos como elipsoides, sistemas de coordenadas, proyecciones cilíndricas, cónicas y azimutales.