Descargado 15 veces


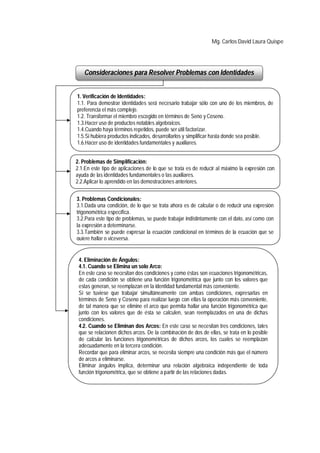







Este documento presenta diferentes identidades trigonométricas fundamentales y auxiliares, así como fórmulas para la suma y diferencia de ángulos. Incluye identidades pitagóricas, de cociente, reciprocas y adicionales. También cubre fórmulas para Sen(x ± y), Cos(x ± y), Tg(x ± y) y Ctg(x ± y), así como fórmulas auxiliares para la suma y diferencia de ángulos. Por último, ofrece consideraciones para resolver problemas con identidades trigonométricas.