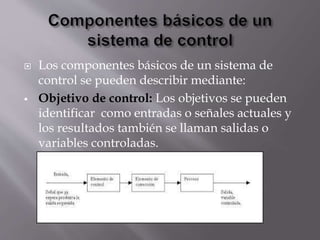
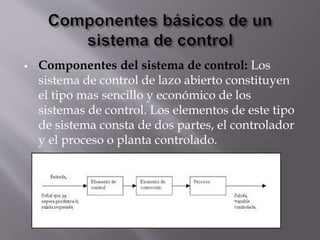
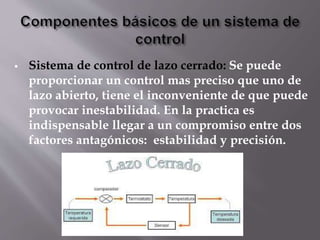
Este documento trata sobre el control automático. Explica que el control automático ha sido vital para el avance de la ingeniería y la ciencia, especialmente en procesos espaciales, de fabricación e industrias modernas. También describe brevemente algunos de los primeros desarrollos del control automático a través de la historia y los componentes básicos de un sistema de control, incluyendo objetivos de control, lazos abiertos y cerrados, y diferentes clasificaciones de sistemas de control.