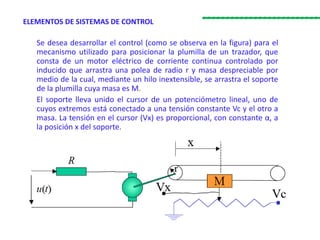
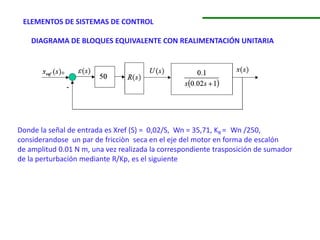
Este documento describe un sistema de control para posicionar la plumilla de un trazador utilizando un motor de corriente continua. El sistema consta de un potenciómetro lineal que mide la posición x de la plumilla y genera una tensión proporcional Vx. El documento proporciona parámetros del sistema como masas, constantes eléctricas y de par del motor. Luego, desarrolla un diagrama de bloques del sistema y obtiene su función de transferencia para analizar la respuesta del sistema.