Descargado 60 veces



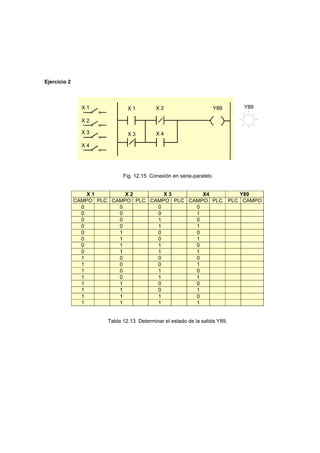
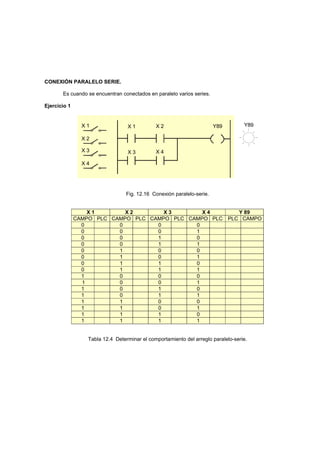
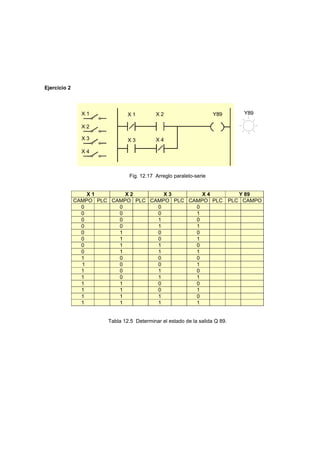


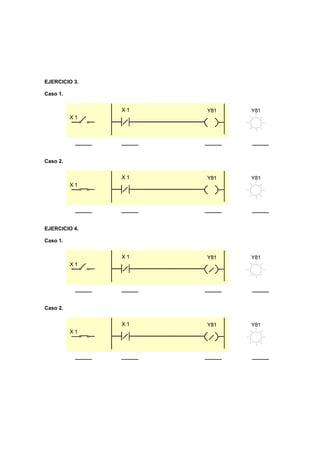

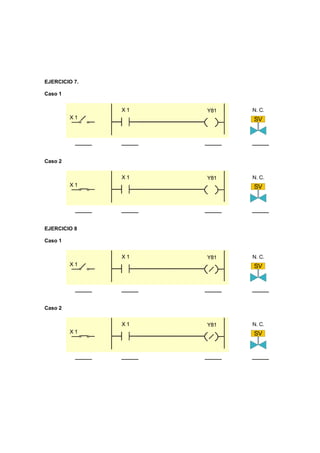
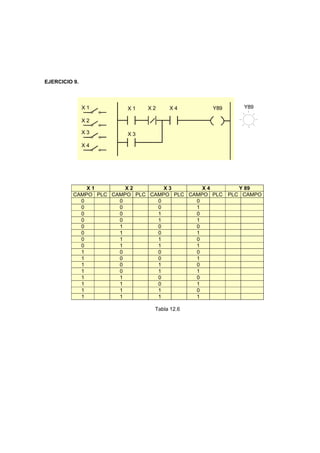
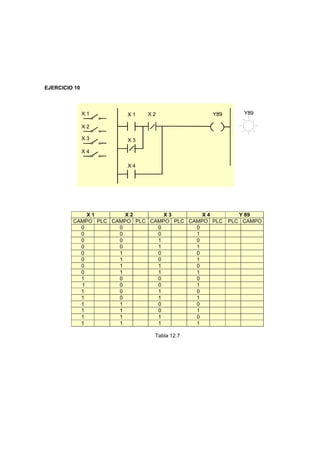

Este documento proporciona una introducción a los diagramas de escalera y lenguajes de programación para PLC. Explica los conceptos básicos de contactos, bobinas, conexiones en serie y paralelo, y temporizadores. También presenta ejemplos de diagramas de escalera simples y ejercicios para analizar diagramas más complejos.

























































