Este documento presenta un resumen de los capítulos de un libro de física fundamental. Incluye 13 capítulos que cubren temas como análisis dimensional, vectores, estática, cinemática, dinámica, trabajo-energía, cantidad de movimiento, fluidos, movimiento armónico, gravitación, calor, termodinámica, electrostática y electromagnetismo. El objetivo del libro es ayudar a los estudiantes a comprender las leyes físicas fundamentales y aplicarlas en la resolución de problemas.











![SISTEMA INTERNACIONAL DE UNIDADES (S.I.)
MAGNITUD UNIDAD s ím b o l o
Longitud metro m
Masa kilogramo kg
Tiempo segundo s
Intensidad de corriente eléctrica ampere A
Temperatura kelvin K
Intensidad luminosa candela cd
Cantidad de sustancia mol mol
Angulo plano radián rad
Angulo sólido estereoradián sr
En la X conferencia de Pesas y Medidas
(1954), se establecieron las unidades y mag
nitudes fundamentales del S.I. Este sistema
fue complementado en la XIV Conferencia de
Pesas y Medidas, realizado en Francia en
1971, el S.I. considera siete magnitudes fun
damentales y dos au-xiliares:
ECUACION DIMENSIONAL.
Es aquella igualdad matemática que
muestra la relación que existe entre una
magnitud derivada y las que asumen como
magnitudes fundamentales.
La DIMENSION de una “magnitud física"
se representa del siguiente modo:
Sea A la magnitud física,
[A ]: dimensión de la magnitud física"A“,
o ecuación dimensional de A.
Ejemplos:
1. [longitud] = L
2. [masa] = M
3. [tiempo] = T
4 [intensidad de corriente] = I '
5. [temperatura] = 0
*
*
#
4t
#
*
f¡
$
*
*
*
♦
*
#
*
*
*
#
♦
*
m
*
m
♦
*
*
*
*
*
*
*
*
*
*
*
*
*
6- [intensidad luminosa] = J
7. [cantidad de sustancia] = N
8. [número) - 1
PRINCIPIO DE HOMOGENEIDAD DIMEN
SIONAL.
Si una fórmula física es correcta, todos
los términos de la ecuación deben ser dimen-
síonalmente iguales.
Sea la fórmula física:
A = B + C . D
[A] = [B] = [C.D]
Ejemplos: Analicemos !a fórmula para
determ inar la altura en
caída libre.
h = V0
I I
m
rn
s
Luego: Todos los términos tienen uni
dad de longitud.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-12-320.jpg)
![1ra. PROPIEDAD:
Los ángulos, funciones trigonométricas,
funciones logarítmicas y en general
cualquier número son adimensionales
Convencionalmente la dimensión de un
número es igual a la unidad.
Ejemplos:
[30o] = 1
[Sen 30o] = 1
*
*
*
*
*
*
*
*
*
*
FINES Y OBJETIVOS DEL ANALISIS DI
MENSIONAL.
1 Expresar las magnitudes derivadas en
función de las denominadas magnitudes
fundamentales
2. Comprobar la veracidad de las fórmulas
físicas mediante el principio de homo
geneidad dimensional
* 3
*
*
*
Determinarformulas empíricas a partirde
datos experimentales.
C PROBLEMAS RESUELTOS
;
PROBLEMA Nfi 01
Determinar la ecuación dimensional
de las principales magnitudes derivadas.
SOLUCION
1. [área] = L2
2. [volumen] = [área x h] = L
3. [densidad] = [ m /v ] = M .L-3
4. [velocidad] = [ e / 1] = LT 1
5. [aceleración] = [ A V / 1] = L.T"2
6. [fuerza] = [ m . a ] - M .L T 2
7. [trabajo] = [ F d ] = M . L 2 .T“ 2
8. [potencia] = [ W / 1] = M.L2 . T ”3
9. [energía] = [ m . c2] = M.L2 T ‘
10 [cantidad de calor] = [energía]
=M.L2 . T 2
11 [presión] = [F/A] = M.L-1 T 2
12. [velocidad angular] =[0 / 1] = T 1
13 [período] = T
14. [frecuencia] = T-1 *
PROBLEMA Ne02
Determinar las unidades de "E" en el
Sistema Internacional.
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
$
*
*
$
*
*
*
*
*
*
*
*
E =
D.V
D: densidad
V: velocidad lineal
g: aceleración de la gravedad
SOLUCION
Del principio de homogeneidad dimen
sional.
[E
]= L.P.U
V
.2
J
tJ lg]
[E] =
M . L~3 . L2 . T 2
L T 2
[E] = M . L
Luego; E se mide en: kg . rrf2
PROBLEMA N®03
Hallar la dimensión de “S" en la
siguiente ecuación dimensionalmente co
rrecta.
V.S. = A Cos 60° + UP . Ln 2
A : aceleración centrípeta
V : velocidad lineal](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-13-320.jpg)
![Del principio de homogeneidad dimen
sional.
[V.S] = [ a Cos60°]
[V][S] = [A 12]
L / r ’ .ts] = l 1/2. t
Luego: [S] = L
-1/2
Para la solución del problema no es ne
cesario conocer el tercer termino.
PROBLEMA N204
En la siguiente fórmula física, indique
las dimensiones de "Y"
Y = w . A . Cos (w.t)
donde:
A = longitud; t = tiempo
SOLUCION
1. La dimensión del ángulo es igual a
la unidad:
[w . t] = 1
[w]. T = 1
[w] = T 1
2 La dimensión de la función coseno
es igual a la unidad:
[Cos (wt) ] = 1
[Y] = [w] [A] [Cos (wt) ]
[Y] = T L . 1
Luego: [Y] = L . T 1
PROBLEMA N205
La velocidad "V" del sonido en un gas
depende de la presión “P" del gas y de la
densidad "D" del mismo gas, y tiene la
siguiente forma:
*
*
«
i*
*
#
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
$
*
*
*
*
*
*
Hallar la fórmula física para determinar
la velocidad del sonido en cualquier gas.
SOLUCION
Del principio de homogeneidad dimen
sional:
[V] = [Px] . [Dy]
L . T 1= Mx . L~x . T 2x . My. L 3y
M °L 1. T 1= Mx+y. Lx_3y . T 2x
A bases iguales le corresponden expo
nentes iguales.
1 .
T : -1 = -2x —
> x = —
M : 0 = x+ y
Reemplazando:
Luego:
1
2
V =P1/2. D~1/2
PROBLEMA N206
Sabiendo que el Impulso es I =F.t, en
contrar las dimensiones de "Z" para que
la siguiente ecuación sea dimensional
mente correcta.
. W ,
Y + m Z
W : trabajo
m : masa
SOLUCION
F : fuerza
t : tiempo
Del principio de homogeneidad dimen
sional
[l] = [Fj-[t]
[I] = M . L . T 2 .T = M . L . T _1
De la ecuación:](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-14-320.jpg)
![i i = M
[Z]
[ m ] [ Z ]
Reemplazando:
M. L. T 1 = M. [Z ]
Luego: [ Z ] = L . T
Compruebe Ud., el mismo resultado con
la otra igualdad.
PROBLEMA Ns 07
Dimensionalmente, la siguiente ex
presión es correcta y su respectiva
ecuación dimensional es la unidad.
[U N A u n i] =1
donde; U = m.C2
m : masa de un fotón
C : velocidad de la luz
I : radio de la Tierra
Hallar la dimensión de N
SOLUCION
Cálculo de la dimensión de U
[U] = [m] [c ]
[U] = M . L2 . T -2 (1)
La dimensión de un exponente siempre
es igual a la unidad.
[ü] [N] [I] =1
M.L2 .T _2.[N]L =1
[N] - M _1 . L-3 . T2
PROBLEMA Ne 08
El período de oscilación de un péndulo
depende de la longitud ( l ) de la cuerda y
.de la aceleración de la gravedad (g) y tiene
la siguiente forma:
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
#
*
*
*
*
*
*
*
*
*
*
#
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
Hallar la fórmula física correcta
SOLUCION
Por principio de Homogeneidad
[ T ] = U x] [g y ]
T = Lx . Ly 1_2y
L ° j1= L**y . T -2y
A bases iguales le corresponde exponen
tes iguales.
L : O = x + y
T : 1 = -2y
Resolviendo:
x = +
y=~
Reemplazando en la formula:
PROBLEMA Ne 09
Un chorro de agua con densidad (D) y
velocidad (V), choca contra un área (A).
La fuerza que ejerce el chorro de agua
contra la superficie tiene la siguiente
forma:
F = ^ Vx . Ay . D2
Hallar la fórmula física correcta.
SOLUCION
Por principio de Homogeneidad
t F ] = [ V x] [ Ay ] [ Dz ]
LMT “2 = LxT x ,L2y .Mz L~3z
L1. M 1. T 2 = Lx+2y_3z MZ.T X
A bases ¡guales le corresponde exponen
tes iguales.
L : 1 = x + 2y - 3z](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-15-320.jpg)
![M : 1 = z
T -2 = -x
Resolviendo
x = 2
y = z = 1
F = V2 V2 A . D
PROBLEMA N® 10
La velocidad de un satélite artificial
terrestre (Sputnik) que se desplaza no le
jos de la superficie terrestre depende de
la distancia al centro de la tierra o radio de
curvatura R y de la aceleración de la
gravedad "g” en la superficie equipoten
cial en que se mueve el satélite.
Determinar una fórmula empírica que
permita calcular el valor de la velocidad.
C = 1 = constante adimensional.
SOLUCION
1. De la condición del problema:
V = C.RX.gy
2. Por el principio de homogeneidad
dimensional.
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
s
i»
*
*
*
*
*
*
*
*
*
*
[V] = [C] [R]x [g]v ....(2)
3. Sabemos que:
[V] = L.T -1 , IR] = L
[C] = 1 , [g] =L . T
4. Reemplazando en (2):
L.T -1 = 1. L*. Ly. T _2y
L1.T _1= L x+y j _2v
Identificando exponentes:
L: 1 = x + y
T -1 = 2y .
.... (3)
1
En (3) X = 7
5. Reemplazando en (1).
V=R . g V = VR7g
...a esta velocidad del satélite se le llama
también VELOCIDAD ORBITAL
PROBLEMAS RESUELTOS Y PROPUESTOS DE
ANALISIS DIMENSIONAL
MAGNITUD UNIDAD S.I. SIMBOLO DIMENSION
Longitud metro m L
Masa kilogramo kg M
Tiempo segundo s T
Temperatura kelvin K O
Intensidad de corriente eléctrica ampere A I
Intensidad Luminosa candela cd J
Cantidad de Sustancia mol mol N](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-16-320.jpg)
![La siguiente es un fórmula física co
rrecta:
KF = mV
donde: m = masa
F = Fuerza
V = Velocidad
Determinar qué magnitud representa K.
SOLUCION:
Por principio de Homogeneidad dimen
sional
[ K . F ] = I m . V ]
I K ] [ F ] = [ m ] [ V ]
[ K ] L M T 2 = M L T 1
[ K ] = T
K representa un tiempo
PROBLEMA Nfi 02
En la siguiente fórmula física:
PK = m g h
donde: P = Potencia
m = masa
g = aceleración
h = altura
¿Qué magnitud representa K ?
a) Longitud b) Masa
c) Tiempo d) Area
e) Volumen
PROBLEMA Nfi 3
La siguiente expresión es dimensio
nalmente correcta y homogénea:
KF = mV2
donde: F = Fuerza
m = masa
V = Velocidad
¿Qué magnitud representa K?
SOLUCION:
Por principio de homogeneidad dimen
sional
[ K.F] = [ m . V2 ]
[ K ] [ F ] = [ m ] [ V 2 ]
[ K ] L M T -2 = M L 2T~2
[ K ] = L
K representa una longitud
PROBLEMA Ns4
La siguiente fórmula física es dimen
sionalmente correcta y homogénea.
KV = mc2A
donde: V = Volumen
m = masa
c = velocidad
A = Area
Determinar que magnitud representa K
a) Longitud b) Masa
c) Tiempo d) Fuerza
e) Densidad
PROBLEMA N®05
En la siguiente fórmula física:
E = AV2 + BP
donde: E = Energía
V = Velocidad
P = Presión
Determinar qué magnitud representa
A/B
SOLUCION
Por principio de homogeneidad
[E] = [A.V2] = [B.P]
L2 MT ~2 = [A] L2T ~2 = [B]L"1MT ~2
------0 ) -----
------------ - (2)
*
*
*
*
*
*
*
*
*
*
*
*
$
*
*
*
*
*
*
*
*
$
#
&
&
#
*
*
#
$
$
#
*
*
$
*
*
$
*
*
*
*
s
í?
4
5
*
*
*
m
*
*
*
«
C
*
*
❖](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-17-320.jpg)
![de (1) [A] = M
de (2): [B] = L3
de donde: = ML
<-3
entonces — representa una densidad.
l5
PROBLEMA N®6
En la siguiente fórmula física.
KX = A d + i- BP
donde
K = Constante Física ( M T~2)
X = Longitud
d = Longitud
p = momentum lineal (M LT ~1)
Hallar qué magnitud representa A.B.
a) Masa b) Tiempo
c) Velocidad d) Aceleración
e) Fuerza
PROBLEMA Ns 7
La siguiente fórmula es dimensional
mente correcta y homogénea:
E = AW2 + BV2 + CP
donde: E : Energía
W : Velocidad Angular
V : Velocidad Lineal
P : Presión
Hallar:
■ m
SOLUCION:
Por principio de Homogeneidad:
[E] =[AW2] = [BV2] = [CP]
L2M1 = [A] "2=[B]L21 ‘2 =[C]L"1M T 2
J
— ------- (2) --------1
-(3).
*
*
*
4)
%
*
*
*
«
¡i
*
*
*
*
*
*
# '
*
*
*
*
0
*
*
«
fe
*
*
*
*
*
i¥
*
Ü
f
*
*
*
*
*
$
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
ü
*
*
*
*
de (1)
de (2)
de (3)
entonces:
[A] = L M
[B] = M
[C] = L3
PROBLEMA Ne8
La posición de una partícula móvil so
bre el eje X está dada por:
X = K1+K2 T + * K3 T2
donde:
Hallar:
X . distancia
T tiempo
K52
c) M
Kl . K3
a) L4 b) T
d) M °L°T° e) N.A.
PROBLEMA N2 9
La fórm ula que determina la altura
máxima h alcanzada por una partícula que
es lanzada verticalmente hacia arriba con
una velocidad inicial Vo tiene la siguiente ‘
forma:
y
h =-
xg*
siendo:
g = aceleración de la gravedad
Hallar la fórmula física correcta.
SOLUCION:
Por principio de Homogeneidad:
x g y](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-18-320.jpg)
![L =
(L T 1)X
(L r2)y
L1T 0 = |_*“y>T 2y~x
de donde: x - y = 1 ....(1)
2y - x = 0 ....(2)
Resolviendo.
x = 2 ; y = 1
entonces:
h =
Vo
2g
PROBLEMA Ns 10
La presión P que un fluido ejerce sobre
una pared depende de la velocidad V del
fluido, de su densidad D y tiene la
siguiente forma:
Hallar la fórmula física correcta
a) P =V2 V2 D2 b) P =V2 V2 D
c) P =V D
e) N.A.
PROBLEMA N® 11
Dada la ecuación:
d) P = V D
F = nx ry v2
donde:
F = Fuerza
n = Viscosidad
masa
; Longitud x tiempo
r = radio (Longitud)
v = velocidad
Hallar: (x + y + z)
SOLUCION:
Por principio de Homogeneidad:
*
*
*
*
*
*
*
*
*
&
*
m
*
%
*
*
*
fj*
*
*
*
m
*
*
*
*
*
*
*
*
*
*
*
*
$
*
♦
¡fe
*
*
*
■
&
*
•3*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
[F] = [n]x [r]y [V]z
LMT-2 = (ML~1T _1)x(L)y (LT “ ’)
L1M1T _2=L~x+y+z M* T ~x_z
de donde:
- x + y + z = 1
x = 1
-x - z = -2
Resolviendo.
x = 1; y = 1 ;
entonces:
(1)
(2)
- - O )
z = 1
x + y + z = 3
PROBLEMA Ne 12
La siguiente es una fórmula física di
mensionalmente correcta y homogénea:
P = K Dx gy hz
siendo:
Hallar.
a) -1
d) 3
K = Adimensional
P = Presión
D = Densidad
g = aceleración
n = altura
(x + y + z)
b) i
e) N.A.
c) 2
PROBLEMA Ne 13
La fórmula para hallar la rigidez de una
cuerda es:
donde:
Q = carga (newtons)
R = Radio (metros)
d = Diámetro (metros)
S = Rigidez (newtons)](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-19-320.jpg)
![Hallar las ecuaciones dimensionales
de las magnitudes a y b.
SOLUCION;
Desarrollando:
por P.H.D.:
[ S ] = [ a ] = [bd2]
LMT “ 2 = [a] L ! MT ' 2 = [b] L2
(1)
(2)
[a] = L-1
[b] = L~1M T-2
de (1):
de (2):
PROBLEMA Ns 14
En la siguiente expresión:
donde: F = Fuerza
V = Velocidad
Hallar la ecuación dimensional de la mag
nitud "b“
a) M ~1T b) MT “ 1
c) M T d) LT
e) N A.
PROBLEMA Ns15
Dada la siguiente fórmula física:
P = KW2 Tg e
donde:
P = Potencia
W = Velocidad Angular
Hailar la unidad de la magnitud K en el
sistema internacional.
*
*
*
*
«
*
*
*
*
SOLUCION:
[P] = [K] [W]2 [Tg6]
La M T 3 = [K] T ’ 2 1
[K] = L2M T “ 1
La unidad de K será:
Kg . n f . s 1
* PROBLEMA N« 16
*
*
*
*
*
*
*
$
*
$
*
*
*
#
*
*
#
*
*
La siguiente es una fórmula física di
mensionalmente correcta.
Q = K A V2gh
donde Q = Caudal (Se mide en m /s)
A = Area
g = aceleración de la gravedad
h = altura.
Hallar la unidad de la magnitud K en el
sistema internacional de unidades
a) L b) L¿
-1
d) No tiene unidades
PROBLEMA Ns 17
c) LT
e) N.A.
Dada la siguiente fórmula física, di
mensionalmente correcta y homogénea:
Q = m.Ce.AT
*
f
t
*
*
donde:
Q = Cantidad de calor
m = masa
AT = Variación de Temperatura
Hallar la ecuación dimensional del
calor específico Ce.
SOLUCION:
[O] = [m] [Ce] [AT]
L2 M T-2 = M [Ce] 6
[Ce] = L2T ”2 6 " 1](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-20-320.jpg)
![Hay que señalar que el calor Q es una
forma de energía
PROBLEMA N® 18 .
Si la longitud final de una barra al di
latarse, está dada por la siguiente re
lación:
Lf = L0 (1+ ccA T)
AT: Variación de la Temperatura.
Determinar la ecuación dimensional
del coeficiente de dilatación lineal a
1
a) L6
d) 0
PROBLEMA N9 19
b) L 6 '
e) N.A.
c) L-1 e
La entropía S de un gas, se define
matemáticamente por la siguiente re
lación:
AS -
AQ
donde:
AS increm ento de Entropía (Si - So)
AQ =Cantidad de Calor absorbido.
T =Temperatura
Hallar la ecuación dimensional de la
entropía "S".
SOLUCION.
[AQ]
[AS] =
m
[S] =
L2 M T 2
*
*
*
*
*
*
*
*
*
*
*
*
*
$
&
*
*
*
*
#
*
*
*
*
*
*
*
*
*
*
♦
*
*
*
*
#
*
*
*
donde'
K = Constante de Boltzman
T = Temperatura Absoluta
Determinar la ecuación dimensional de la
constante de Boltzman.
a) L M T ~2 6 -1
c) L2 M T -2e
b) L M T e
d) L2M T _2e
e) N.A.
PROBLEMA N®21
La siguiente es la ecuación universal
de los gases ideales
PV = n R T
donde:
P = Presión
V = Volumen
n = Número de moles
T = Temperatura
Hallar la ecuación dimensional de la
constante universal de los gases R.
SOLUCION:
[P] [V] = [n] [R] m
L-1 MT ~2 . L3 = N [R] 6
[R) = L2 M T_2e V 1
PROBLEMA N®22
La energía interna, por mol, de un gas
ideal depende únicamente de la tempera
tura, como lo indica la siguiente fórmula.
*
[S] = l2 m r 2e~1 *
*
*
*
U=f RT
PROBLEMA N® 20
La siguiente fórmula física nos deter
mina la energía cinética promedio de una
molécula monoatómica de un gas ideal.
E = f KT
*
*
#
*
donde:
R = Constante Universal de los gases
T = Temperatura.
Determinar la ecuación dimensional de la
energía interna U.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-21-320.jpg)
![b) MLT “2 N“ 1
d) ML2 T ~2 N
a) ML2T~2N _1
c) ML2T -1N ~1
e) N.A.
PROBLEMA Ne23
La cantidad de calor Q que atravieza
una lámina de Area A y espesor b, desde
una temperatura Ti hacia una tempera
tura T2 , en un tiempo t está dada por la
siguiente fórmula:
<
*
II
0
fT s -T i 1
" b 1
l D J
donde:
K = Conductividad térmica del mate
rial.
Hallar la ecuación dimensional de K
SOLUCION:
[Q] = [ K ] [ A ] ^ [ t ]
L2MT~2 = [Kj L2 . ® .T
[K] = LMT -3 6 ~1
PROBLEMA Ne 24
El calor latente de fusión de una sus
tancia está definido por la siguiente re
lación:
r Q
C l =~r
m
donde:
Q = Cantidad de calor entregado,
m = masa de la sustancia
Hallar la ecuación dimensional del calor
latente CL
a) L2t '
c) L2T 2
e) N.A.
b) LT
d) L T 1
-2
*
*
*
*
*
*
*
*
*
*
*
%
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
$
*
*
*
$
*
*
*
*
*
*
*
*
*
*
*
*
O
f
*
*
*
*
*
¡h
*
*
*
*
*
*
*
Si la intensidad de corriente eléctrica
se define por la siguiente relación:
1=
donde:
Q = Carga Eléctrica
t = Tiempo
Hallar la ecuación dimensional de la
carga eléctrica "Q"
SOLUCION:
[11 =
M
[t]
[Q] = I T
La unidad de carga eléctrica es el cou
lomb (c) en honor a Charles A. de Cou
lomb (1736 -1806) que fue el primero que
midió las fuerzas eléctricas y magnéticas.
Según ésto:
1c= 1A.S
PROBLEMA N926
Si el potencial eléctrico V define por la
siguiente relación:
V —
w
o
donde: W = trabajo
Q = Carga Eléctrica
Hallar la ecuación dimensional del po
tencial eléctrico V.
a) L2M T ^ r 1
c) LMT~3r 1
e) N.A.
b) L2M T~2 r 1
d) LMT 2 1
-1](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-22-320.jpg)
![La ley de Ohm, se expresa matemáti
camente por la siguiente relación:
AV = IR
donde:
AV = Diferencia de Poten
cial
I = Intensidad de Co
rriente Eléctrica
R = Resistencia Eléctrica
Hallar la ecuación dimensional de la
resistencia eléctrica "R".
SOLUCION:
m = [t][R ]
L2M T_3I“ 1 = I [R]
[R] = L 2M T ~ 3 r 2
Para la ecuación dimensional del poten
cial electrico V se ha utilizado el resul
tado del problema anterior.
La unidad de resistencia eléctrica es el
Ohm (Li) en honor a Georg S Ohm
(1787 - 1854) quien formuló la ley de
Ohm. según ésto.
1 0 = 1 m2KgS“3 A~2
PROBLEMA N9 28
Si la capacidad eléctrica de un con
ductor se define matemáticamente como:
C =7
donde: Q = Carga Eléctrica
V = Potencial Eléctrico
Hallar la ecuación dimensional de la ca
pacidad eléctrica C
a) L-1M -1 T 4 1
2
c) L-2 M -1 T 4I
e) L_2.M~1T 4 . 1
2
b) L-1M~1T 4 I
d) L-2 M, T 4 I
*
m
m
«¡6
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
+
*
*
*
#
*
*
#
*
*
*
*
*
*
*
üt
*
*
*
*
*
La fuerza F que actúa sobre un alam
bre, por el cual circula una corriente I, está
dada por la siguiente relación:
F = I L B
donde:
L = Longitud del alambre
B = Densidad de flujo magnético ex
terno.
Hallar la ecuación dimensional de "B".
SOLUCION:
[*=] = [ l ] [ L ] [ B ]
LMT -2 = I L [ B ]
[B] = M T
-2,-1
La unidad de densidad de flujo magnético
es la TESLA (T) en honor de Nickola
Testa (1856-1943) quien demostró el
valor de la corriente alterna. Según ésto:
1T = 1Kg.s~2A_1
PROBLEMA N®30
Si el flujo m agnético, se define
matemáticamente por la siguiente re
lación:
<
}>= BA Cos 6
Donde:
B = D ensidad de flujo
magnético
A = Area
Hallar la ecuación dimensional del flujo
magnético <
J
>
a) L M T -2 I _1
c) L2 M T “2 1
e) N.A.
b) L M T ^ I
d) L2 M T 2 I”1](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-23-320.jpg)
![Si la inductancia de un bobina está
dada por la siguiente relación:
I
donde:
N = Número de vueltas del arro
llamiento
$= Flujo magnético
I = Intensidad de corriente
Hallar la ecuación dimensional de la
inductancia “L"
SOLUCION:
[N] m
[L i
li]
[L] -
l2 m t ~2 r 1
[ L ] = L2M T “2r 2
Hay que hacer notar que el número de
vueltas N es adimensional y la dimensión
del flujo magnético <
¡>se ha tomado del
problema anterior. La unidad S.l. de In-
ductancia es el Henry (H) en honor a
Joseph Henry (1797 -1878) que realizó
experimentos que condujeron al
telégrafo eléctrico. Según esto:
1H = 1m2 . Kg . s-2 A-2
PROBLEMA Nfi 32
La energía W que almacena una bo
bina en forma de campo magnético tiene
la siguiente forma:
W J - i x Ly
x
donde:
I = Intensidad de corriente
L = Inductancia de la bobina
Hallar (x+y)
*
*
*
*
s
k
i
*
sis
#
m
m
*
*
m
*
*
*
*
*
s
is
<
¡f
*
*
<
¡f
*
$
*
*
*
m
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
a) 1 b) 2
d) 4 e) 0
PROBLEMA Ne33
La intensidad de Campo Eléctrico E,
está definida matemáticamente por la
siguiente relación:
E = ^
q
donde:
F = Fuerza Eléctrica
q = Carga eléctrica de
prueba
Hallar la unidad S.l, de "E" (1voltio
(V) = m2 Kg s~3 A-1 )
SOLUCION:
[El J f l
11 L
q]
[E
]
LMT
= |T
[E] = LMT ~3 1_1
Según ésto la unidad S I de la intensidad
de campo Eléctrico es:
m . K g . s~3A-1
pero por definición:
1V = m2 Kg . s-3 A-1
entonces la unidad de E es:
1 V/m
PROBLEMA Nfi 34
La fuerza de Lorentz, que es la fuerza
que actúa sobre una partícula que se mue
ve con una velocidad V en una región
donde existe un campo eléctrico E y un
campo magnético B, está dada por la si
guiente relación.
F = XE + Y V . B
Hallar las unidades S.l. de las magni
tudes X e Y. (1 coulomb (c) = 1 A.S)](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-24-320.jpg)
![a) 1c ;1A b) 1c ; 1c
c)1c;1A.S d )1 c .s ;1 c
e) N.A.
PROBLEMA Ne35
La densidad de flujo magnético B,
originado por una corriente rectilínea I, a
una distancia radial r, está dada por la
siguiente relación:
B =
2n
Hallar la unidad S.l. de la permeabili
dad magnética n .(1Henry(H)=1m .Kg.s-2.A-2)
SOLUCION:
,111
[B] =[H]
[ r ]
lv i = LM T-2r 2
Según ésto la unidad S.l.de la permea
bilidad magnética es:
m . Kg . s ~2A-2
p _p o
Pero por definición: 1H =m Kgs A
entonces la unidad de n es: 1H/m
PROBLEMA Nfi 36
La intensidad de campo magnético H
se define matemáticamente como:
donde: B = Densidad de flujo
magnético
u = Perm eabilidad m ag
nética
Hallar la unidad S.l. de “H"
a) A m b) A/m c) m/A
d) A e) N.A.
*
*
s|í
*
$
*
*
#
*
*
*
*
#
#
*
*
*
*
*
#
s
je
*
*
+
*
*
#
#
*
*
#
*
*
*
*
¡Se
*
*
*
*
*
*
*
*
*
$
Determ inar la velocidad de propa
gación de una onda mecánica en una
cuerda tensa sabiendo que depende de la
fuerza de tensión F a la cual está sometida
y de su densidad lineal de masa n (masa /
longitud). La constante numérica de pro
porcionalidad es la unidad.
SOLUCION:
La velocidad de propagación V puede
expresarse de la siguiente manera:
V = K
siendo K la constante numérica de pro
porcionalidad.
Por principio de homogeneidad dimen
sional.
[V] = [F]x [|o.]y
L T 1 = (LM“
r 2)x(ML-1)y
L1M °T _1 = Lx-y Mx+yT “2*
A bases iguales le corresponden expo
nentes iguales.
L :
M :
T :
Resolviendo:
Por lo tanto:
1
1 = x —y
0 = x + y
-1 = —
2x
e y = -
PROBLEMA Ns 38
La aceleración centrípeta es una mag
nitud física vectorial que mide el cambio
que experimenta la velocidad en direc
ción y sentido. Se representa por un vec
tor que indica en todo instante al centro
de curvatura.
Su valor depende déla velocidad lineal
"V" y del radio de curvatura "R" de la
trayectoria. Hallar la fórmula empírica
para calcular el valor de la aceleración
centrípeta ac-](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-25-320.jpg)
![La constante numérica de proporcio
nalidad es la unidad.
a) ac = V¿R
c) ac = V ~2R
e) N.A.
PROBLEMA N939
b) ac = VR
d) ac = V^R-1
La cantidad de calor "Q“ que disipa un
conductor cuando por él circula una co
rriente eléctrica, depende de la intensidad
de corriente "I" que por ella circula, del
valor de su resistencia "R" y del tiempo
"t" transcurrido. Si la constante numérica
de proporcionalidad es k = 1, hallar la
fórmula empírica de la cantidad de calor
Q.
SOLUCION
La cantidad de calor Q puede expresarse
de la siguiente manera:
Q = K I x R y t z
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
siendo K la constante numérica de pro
porcionalidad.
Por P..H.D. tenemos que:
[O] = [ I f [ R ] y [ t ] z
l2m t "2 = i*(l2m t ~3 r 2) y t 7
L2M1T -2 |0= L2yMy T - 3y+zr 2y
A bases iguales, le corresponden expo
nentes iguales.
L 2 = 2y
M : 1 = y
T : -2 = -3y + z
I 0 = x - 2 y
Resolviendo:
x = 2 ; y = 1 ; z = 1
Luego.
Q = r R T](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-26-320.jpg)

















































![NOMBRE FIGURA X 7
Triángulo h r
g
^ c : 1 —
^ n. y
h
3
Cuarto de Circun
ferencia
1 « > •
2R
K
2R
n
Semi
circunferencia
0 2R
k
Cuarto de
Círculo
B ‘ « - Y . / - * ■
* ; M iT ( ■ ■ i
L j " 8
?
4 R
3 rc
4 R
3 ’ 7t
Semi
círculo
0 4 R
3 ' 7
T
Arco de
Circunferencia
r/ V b
Á G ] X b G I
j * Ñ r — '
! x L x X '
R . Sen 0
e
0
Sector
Circular
2R.Sen 0
30
0](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-76-320.jpg)





























![Calcular en qué intervalo se encuentra
el valor de la fuerza horizontal F con ia
condición que el bloque de 55N de peso
se encuentre en equilibrio. El coeficiente
de rozamiento estático en el plano incli
nado es 0,5.
Haciendo D.C.L. de A y aplicando la 1ra
condición de equilibrio:
*£Fy += ZFy -
N = W + 10
h = 0,6 (W + 10)
a) [10, 70]N
c) [30 ; 70]N
e) N A.
PROBLEMA N« 73
b) [10 ; 110]N
d) [30 ; 110]N
Los bloques A y B mostrados en la
figura se mueven hacia la derecha con
velocidades constantes de 2m/s y 3m/s
respectivamente. Si el peso del bloque A
es de 10N y el coeficiente de rozamiento
entre todas las superficies en contacto es
0,6, hallar el valor de F.
2F
£ A
H L
SOLUCION;
Como el movimiento relativo de B res
pecto de A es hacia la derecha la tuerza
de rozamiento (cinético) que actúa sobre
B es hacia la izquierda. Haciendo D.C.L.
de B y aplicando la 10condición de equili-
bno: _
w
IFy + = ZFy -
N = W
fi = 0,6W
F + fi = f2
F + 0.6W = 0,6(W + 10)
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
#
*
*
*
*
*
*
*
F = 6N
PROBLEMA N974
En el sistema mostrado en ia figura los
pesos de los bloques A y B son de 20N y
40N respectivamente v el coeficiente de
rozamiento estático entre todas las super
ficies planas en contacto es de 0,5. Deter
minar la mínima fuerza horizontal F capaz
de iniciar el movimiento del sistema. No
existe rozamiento en las poleas.
I ! “ h —
_ . _ í 3 i
— B ______
a) 25N
d) 4CN
b) 30N
e} 45N](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-106-320.jpg)

















![Posición de la partícula en cada instante
de tiempo o posición final:
xf = xo + d
El sentido de los vectores posición y des
plazamiento se representa por los signos,
positivo (+) a la derecha y negativo (-) a la
izquierda.
rara el M.R.U.
xf = Xo + V. t
Signos del vector velocidad:
(+V): Movimiento a la derecha, sentido
del eje x positivo.
(- V ): Movimiento a la izquierda, sentido
del eje x negativo.
Y
V
rnov 0
---------- f)>
0
1
1
1
• 1
l
1
r i
«
Xo
D>- (+ x )
GRAFICAS DEL MOVIMIENTO
Relaciona matemáticamente, la posición,
velocidad y aceleración de una partícula en
cada instante de tiempo, haciendo uso de un
sistema de coordenadas cartesianas.
Para el movimiento rectilíneo uniforme:
1) Posición vs Tiempo. Muestra gráfica
mente la relación, entre la posición de
una partícula en cada instante de tiempo.
*
*
*
*
*
*
*
*
*
*
*
»
*
*
*
*
*
*
*
*
*
*
*
«i*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
m
*
*
*
*
I) La pendiente de la recta es igual a
la velocidad de la partícula.
V = Tg0
II) La recta corta el eje de ordenadas
en un punto que nos da la posición
inicial de la partícula.
2) Velocidad vs Tiempo. Muestra gráfica
mente la relación, entre la velocidad que
tiene la partícula en cada instante de
tiempo.
IV(m/s)
t(s)
I) El área bajo la recta, es igual al
espacio recorrido por la partícula.
A = espacio recorrido
II) En general, el área bajo la recta es
igual al cambio de posición que ex
perimenta la partícula, en un inter
valo de tiempo.
U = x ^ 7 ]
PROBLEMA Ne 1
Una persona sale del punto A en auto
a una velocidad de 12 km / h, llega a B y
desea regresar caminandoa 4 km / h
(siguiendo el mismo camino) si todo el
recorrido duró 6 horas. ¿Durante cuánto
tiempo estuvo caminando?
SOLUCION:
El espacio recorrido es el mismo
e - V i. ti = V2 . 12
(12) ti =(4) te
te = 3 ti .... (1)
Pero: 11 + 12 = 6h .... (2)
Resolviendo (1) y (2):](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-124-320.jpg)























![3 PROPIEDAD: El espacio recorrido
por la partícula es igual, al área bajo la
curva (en general) sin considerar los sig
nos.
espacio = Ai + A2
PROBLEMA N® 16
La figura muestra, la gráfica V - t de
una partícula que sale del origen (X = 0),
moviéndose en línea recta.
¿Cuál(es) de las siguientes afirmacio
nes son verdaderas?.
I) Del instante t = 2 a t = 3 s. la partícula se
encuentra en reposo.
II) En el intervalo de tiempo [0 ; 5] segun
dos, el espacio recorrido por la partícula
fue de 5 metros.
III) En el instante t = 4,5 s, el móvil estaba
de regreso a su posición inicial,
IV) En el instante t = 4 s, el móvil se en
cuentra a 2 metros del origen.
a) Sólo I y II b) Sólo III
c) Sólo I , II y IV d) Sólo II y III
e) Todas son verdaderas
PROBLEMA Nfi 17
Una partícula se mueve sobre el eje
X. En el instante t = 0, su posición es
X0 = - 2m. La figura muestra sus gráfica
V - t .
Determinar su posición en el instante
t = 6 s.
*
*
*
#
*
*
*
$
*
*
*
*
*
♦
*
*
*
*
*
*
*
*
*
$
*
*
*
«i
*
*
*
*
*
*
s¡*
#
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
SOLUCION
El cambio de posición que experimenta
la partícula es igual al área bajo la recta;
en la gráfica V - 1
(Xf - X0) = área del trapecio,
(3 + 9) ^
(Xf - X0) = — g— . 6
XF- (—2) = 36
XF = 34 m
PROBLEMA Ns 18
Dos móviles A y B parten al mismo
tiempo, si en el instante t = 0, sus posi
ciones son: Xa = - 2 m y Xb = 4 m,
respectivamente. Calcular en qué ins
tante de tiempo “t" se encuentran, si sus
gráficas V - t son las siguientes:
Vü(m/s)](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-148-320.jpg)
![Nota: A y B se mueven sobre el eje X.
a )t = 2 s b )t = 4 s
c) t = 6 s d) t = 8 s
e) N.A.
PROBLEMA Ne 19
Una partícula se mueve sobre el eje X,
en el instante t = 0, su posición es
Xo= 0- La figura muestra su gráfica V - 1.
Determinar su posición en el instante
t = 6 s y el espacio recorrido en el inter
valo de tiempo [0 ; 6] segundos.
SOLUCION:
El cambio de posición, que experimenta
la partícula es igual al área bajo la recta,
en la gráfica V - 1
:
- Cálculo del área:
Ai = 16m y A2 = 4m
Luego: (Xf - X0) = Ai - A2
Xf - 0 = 16- 4 m
XF = + 12m
y 1
J L
16 m ¡
. --- ------- ¿t=4
0
iH --- ^ ^ ^
4 m
,=6
- Cálculo del espacio recorrido:
e = Ai + A2
e = 16 m + 4 m
e = 20m
PROBLEMA NB20
La figura muestra, la gráfica V - t, de
una partícula que se mueve en el eje X, en
el instante t = 0, la posición del móvil es:
Xo = +2 m.
¿Cuál(es) de las siguientes afirmacio
nes son verdaderas?
I) En el instante t = 4s, la partícula se en
cuentra en el origen de coordenadas: (X
= 0).
II) En el intervalo de tiempo [0; 4] segundos,
el espacio recorrido por la partícula fue
de 10 metros.
III) En el intervalo de tiempo { 2 ; 3 ) segun
dos, la velocidad y aceleración tienen
igual sentido (a la izquierda, respecto del
sistema de referencia).
*
*
*
*
*
*
*
*
*
*
*
*
*
»
!>
*
*
*
*
*
*
*
*
*
*
*
*
*
*
♦
*
*
#
*
*
*
*
*
*
*
*
*
*■
*
*
*
*
*
*
*
*
*
*
*
*
*
♦
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-149-320.jpg)
![IV) En el instante t = 3,5 s el rhóvil estaba de
regreso a su posición inicial.
a) Sólo I y II b) Solo II y III
c) Sólo I, II y IV d) Sólo IV
e) Todas son verdaderas.
PROBLEMA Ne21
La gráfica velocidad versus tiem
po, describe el movimiento de una par
tícula. Si para t = 24 segundos, el espacio
recorrido es 96m. ¿Qué velocidad máxima
alcanzó la partícula?
t ( s )
La velocidad máxima es igual a la altura
del triángulo
El espacio recorrido por la partícula es
igual al área del triángulo, en la gráfica
V - t :
b x h
e = -
96 =
2
(24) .V
Vmax = 8 m/s
PROBLEMA Ne22
La figurs muestra, la gráfica V - 1 de
una partícula que se mueve en el eje
X. Inicia su movimiento en la posición
Xo = 12 m, (t = 0)
*
*
*
*
*
&
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
+
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
♦
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
¿Cuál(es) de las siguientes afirmacio
nes son verdaderas?
I) En el instante t = 2s, el móvil se encuentra
en el origen ( X = 0)
II) En el instante t = 4s, el móvil se encuentra
en su posición inicial (X = 12m).
III) En el intervalo de tiempo [0; 5] segundos,
el espacio recorrido por el móvil fue 28
metros.
IV) En el instante t = 3s, el móvil se encuentra
a 4 metros del origen (X = 4m).
a) Solo I y II b) Sólo II y III
c) Sólo III y IV d)Sólo I, II y III
e) Todas son verdaderas
PROBLEMA Ne 23
Un auto está esperando que cambie la
luz roja, cuando la luz cambia a verde, el
auto acelera a razón de 2 m/s2 durante 6
segundos, después del cual se mueve
con velocidad constante, en el instante
que el auto comienza a moverse un ca
mión que se mueve en la misma dirección
con velocidad constante de 10 m/s, lo
pasa. ¿En qué intervalo de tiempo y a qué
distancia se encontrarán nuevamente el
auto y el camión?
SOLUCION:
1) Analizando el movimiento del auto:
VF = Vo + a . t
Vf = 0 + 2 (6) = 12](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-150-320.jpg)








































![v) Además sabemos que: *
♦
.... (4)
vi) Reemplazando (4) en (3):
W = 2 n. f .... (5)
4) LEY de KEPLER para el M.C.U.
Toda partícula o punto material que tiene
movimiento circular uniforme, describe areas
iguales en tiempos ¡guales, respecto de un
sistema de referencia ubicado en el centro de
la circunferencia".
Ley de áreas:
“Areas iguales en tiempos iguales"
*
*
*
*
»
*
*
*
*
*
*
*
*
*
CONCEPTO.
Es aquel movimiento que tiene como tra
yectoria una circunferencia, en el cual la par
tícula aumenta o disminuye su velocidad an
gular progresivamente, por consiguiente se
mueve con aceleración angular constante.
1) Aceleración Angular ( a ). Es una mag
nitud vectorial que mide la rapidez de
cambio de la velocidad angular que ex
perimenta una partícula. Se representa
por un vector perpendicular al plano de
rotación.
*
*
*
*
*
*
*
*
$
*
*
Fig. 1
AW
Unidades:
rad
„2
rad
- 2
min
Dimensionalmente:
[ a ] = T
-2
.... (3)
2) En el M.C.U.V., la velocidad lineal o tan
gencial cambia en módulo, dirección y
sentido. A la medida de la rapidez de
cambio de la velocidad lineal se le llama
"aceleración lineal" que es diferente a la
"aceleración angular".
3) Descomposición rectangular
aceleración lineal
de la
La aceleración lineal se puede escribir en
función de dos componentes mutuamen
te perpendiculares llamados: aceleración
tangencial y aceleración centrípeta.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-191-320.jpg)

















![e = ^ . h
e =
2
(2 + 6)
7t = 47C
Número de vueltas = -7- = ~ = 2
2 71 2tc
# V = 2
PROBLEMA N920
La gráfica, velocidad angular versus
tiempo, describe el movimiento circular
de una partícula.
Determinar el número de vueltas que
describe hasta el instante t = 8 s
a) 2 V
d) 8 V
b) 4 V
e) N.A.
c) 6 V
La figura, muestra la gráfica: a - t de
una partícula que describe una trayecto
ria circular. Si en el instante t = 0 su
velocidad angular es “ co“ y para t = 4 s la
velocidad angular es "3ü)", determinar su
velocidad angular para t = 6 s.
*
*
*
*
*
*
*
£
*
*
*
$
$
*
*
*
*
*
*
*
#
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
$
$
2)
En el intervalo de tiempo [0 ; 4) se
gundos, el área bajo la recta es igual
al cambio de la velocidad angular.
(cüf - túo) = área del A
(3co-co) = | (4) (8)
co= 8 rad / s
En el intervalo de tiempo [4 ; 6] se
gundos.
c ü f = ©o + c t. t
cof = 24 + 8 (2)
c ü f = 40 rad/s
para t = 6 s
PROBLEMA NS 22
Se tiene la gráfica a - t de una
partícula que se mueve describiendo una
trayectoria circular. Si en el instante t = 0
su velocidad angular es "co" y para t = 4 s
su velocidad angular es "3co", determinar
su velocidad angular para t = 8 s.
a) 31 rad/s b) 41 rad/s
c) 51 rad/s d) 61 rad/s
e) Ninguna
PROBLEMA Ns23
Una rueda durante su recorrido ne
cesita 3 segundos para girar un ángulo de
234 radianes. Su velocidad angular al ca
bo de este tiempo es de 108 rad/s. Deter
minar su aceleración angular constante.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-209-320.jpg)


![F 2F 3F
masa = —= — = —-
a 2a 3a
Peso(W)
Es una magnitud física vectorial. Se de
fine como la fuerza resultante que ejerce la
tierra sobre los cuerpos que lo rodean. Se
representa por un vector que indica en todo
instante al centro de la tierra.
Todo cuerpo abandonado cerca de la
superficie terrestre, cae con una aceleración
constante, a = g. En caída libre la única
fuerza que actúa sobre el cuerpo es su peso
(F = W).
p is o
De la segunda Ley de Newton:
]
F = m a -» W = m . g
SISTEMAS DE REFERENCIA
1) Sistema de Referencia Inercial
Se denomina de este modo al sistema de
referencia que se encuentra fijo a la tierra
(reposo relativo) o se mueve con velocidad
constante en línea recta respecto a un siste
ma de referencia fijo a la tierra.
2) Principio de D’Alambert (1 850)
(Sistema de Referencia No Inercial)
Es aquel sistema de referencia con movi
miento acelerado respecto a otro (a la tierra
en este caso particular).
El sistema de referencia puede tener ace
leración tanqencial y/o aceleración centrí
peta.
Realicemos el D.C.L. de la esfera de
masa "m" respecto de! sistema de referencia
Inercial S (fijo a la fierra).
Realicemos ahora el D.C.L. de la esfera
de masa “m" respecto dei sistema de refe
rencia No Inercial S’ (ubicado en el carro).
Para nuestro observador el cuerpo se en
cuentra en reposo, por consiguiente la fuerza
resultante es igual a cero.
Para el observador S la fuerza resultante
de T y mg es igual al producto de la masa por
la aceleración.
Para el observador S la fuerza que pro
duce el equilibrio es F’ (fuerza de inercia).
Luego:
La fuerza de inercia, tiene sentido opues
to a la aceleración del sistema respecto de la
Tierra.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-212-320.jpg)
























































![Reemplazando:
d = 2m
PROBLEMA N® 09
La figura muestra un proyectil que se
mueve horizontalmente con la velocidad
"v”y una energía cinética igual a 600 J. El
proyectil atravieza un bloque de madera
de espesor d = 19 cm, de tal modo que la
velocidad del proyectil cuando sale es
"0, 9v". Calcular la fuerza de oposición
promedio que ejerce la madera al paso del
proyectil.
SOLUCION:
Del teorema del trabajo y la energía me
cánica: El trabajo realizado por fuerzas
diferentes al peso, es igual a la variación
de la energía mecánica del proyectil.
!------------------------------------------------I-
1
¿-----------------------------------------------*
WF = | m ^ v F-v ,]....(1 )
Pero, del dato del problema:
& 4
* ¿ m v2 = 600 J
$ 2
$
J Reemplazando en (1)
*
*
*
*
- F . d. = - | m ( 0 , 19 v2)
F (0,19m) = (0,19) (600 J)
F = 600 N
PROBLEMA Nfi 10
Desprecie la pérdida de energía por roza-
* En el sistema mecánico mostrado, ha
* llar la mínima velocidad “v0" que debe
* tener el carrito en la posición "A" de modo
* que pueda rizar el rizo completamente.
* _
* miento.
*
*
*
m
*
*
*
*
*
*
*
*
*
*
*
*
+
*
♦
*
*
*
1
»
*N
*
*
*
*
*
*
* SOLUCION:
jjl
* Cuando el carrito pasa por el límite supe
* rior de su trayectoria, la reacción normal
* de la superficie sobre las ruedas es igual
* a cero, N = 0, de la condición del proble
* ma, su energía cinética debe ser mínima.
*
De la segunda ley de Newton, en la
* posición "B". Dinámica circular.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-269-320.jpg)
































![U = e V
Cos a
Cos p
Reemplazando (4) en (3):
e Tg p - Tg a
..(4)
-u =
e +1
Despejando “e"
CASOS PARTICULARES
I) Una partícula incide sobre una superficie
perfectamente lisa, formando un ángulo
" a " respecto de la normal y rebota for
mando un ángulo" B E l coeficiente de
restitución entre la partícula y la superfi
cie es:
Sabiendo que;
0 < e < 1 a < p
II) Para un choque perfectamente elástico
(e = 1),el ángulo de incidencia y el ángulo
de reflexión son iguales.
Sí
III) Cuando una partícula choca perpendicu
larmente con una superficie fija (Tierra),
su velocidad de incidencia "V” y su velo
cidad de reflexión "U“ se relacionan del
siguiente modo:
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
$
*
*
*
*
*
*
*
*
*
*
*
*
AU
1 U = e . V ]¡
e < 1
Si el choque es perfectamente elástico
(e = 1), las velocidades de incidencia y
reflexión son iguales.
IV) Cuando una partícula es abandonada
desde una altura 'H“ y choca con una
superficie horizontal la altura máxima que
alcanza después del primer rebote será:
e <1
En general, la altura máxima después de
n-ésimo rebote será:
hn = e2n . H
n= 1; 2; 3; 4;](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-302-320.jpg)













![El valor del empuje es igual al peso del
volumen del líquido desalojado por el cuerpo.
Pero el volumen del líquido desalojado es
igual al volumen sumergido del cuerpo.
Empuje = D (Liq). g. Volumen sumergido
Ñ " i l
i
1
1
i
t
1
t
y 0
& f '
X
*
V] P2 y
F í g . ( i )
/
/
1) Consideramos un cuerpo cilindrico de al
tura H = h2 - hi y de área de ia base "A",
como indica la figura
2) En la figura (1) se muestra el diagrama
de presiones que actúa sobre el cilindro,
debido al líquido que lo rodea.
m
*
*
*
♦
Si»
*
*
*
#
*
*
m
&
m
*
*
*
£
*
*
*
*
*
$
#
*
*
*
*
*
#
*
*
*
*
*
*
♦
*
*
#
*
*
*
#
*
*
*
m
*
*
*
*
#
3) De observarse que la presión hidrostática
aumenta con la profundidad. Además en
el perímetro de la base del cilindro la
presión actúa en toda dirección y sentido
pero con la misma intensidad.
4) Las presiones que actúan en la superficie
lateral del cilindro se eliminan, razón por
la cual la fuerza resultante es igual a cero
en la horizontal.
5) Las presiones Pi y P2 son de magnitud
diferente, debido a las alturas hi y h2,
respectivamente
6) Sabemos que:
Fuerza = Presión x Area
Luego: F2 = P2 -A ....(1)
F1 = P1 . A .... (2)
7) El empuje se define como la fuerza resul
tante que actúa sobre el cuerpo, debido
a la presión que ejerce el líquido sobre el
cuerpo
Empuje = F2 - F1 .... (3)
Reemplazando (1) y (2) en (3)
E = P2. A - P i . A
E = (P2 - P i ).A (4)
Por el principio fundamental de la
Hidrostática, en (4)
E = D (líq). g (h2 - hi). A
Pero: Volumen sumergido =
(h2 - h i) . A
Luego: ^
| Empuje = D (líq). g. V(sumergido) |
PRESION ATMOSFERICA
Es la presión que ejerce el aíre sobre los
cuerpos, debido a la acción del campo gravi
tatorio. El aire que rodea a la Tierra esta
compuesto con mayor porcentaje por Nitró-
geno(78%) y oxígeno(21 %).
La densidad del aire varía con la altura,
por consiguiente con la intensidad del campo
gravitatorio. Ahora bien, la presión del gas](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-316-320.jpg)
















































![CONCEPTO:
Es aquel fenómeno físico que consiste en
el aumento en sus dimensiones que experi
mentan ciertos cuerpos como resultado del
ai ciento de su temperatura. Si la tempera
tura de un cuerpo disminuye ésta tenderá a
contraerse.
Cuando calentamos un cuerpo (Aumento
de su temperatura) las moléculas de la sub
stancia aumentan su energía cinética (vi
bración, rotación, traslación) por consiguien
te las moléculas necesitan mayor espacio
para moverse, entonces decimos que el
cuerpo se ha dilatado
Podemos simular a las moléculas como
si fueran esferas unidas medíante resortes,
que cuando es calentado vibran con mayor
amplitud esto quiere decir que los resortes se
estiran, por lo tanto necesitan mayor espacio
para moverse
*
$
*
«
*
•
*
*
*
*
*
*
*
*
*
*
s
»
$
*
*
$
*
*
*
*
*
*
J
j*
*
*
*
*
$
#
En toda dilatación la masa del cuerpo se
mantiene constante.
DILATACION LINEAL
Es el aumento longitudinal que experi
mentan los cuerpos lineales al incremen
tarse su temperatura. Experimentalmente
se demuestra que el incremento de su longi
tud es directamente proporcional a su longi
tud inicial y al incremento de su temperatura
‘ A L = a .Lo . A t
* Lf - Lo = a L0 . A t
* Lf = Lo . (1 + a . t)
a : coeficiente de dilatación lineal de
pende de las propiedades térmicas
del material.
1 oL
[ a ] = °C ~1 , °K_I
DILATACION SUPERFICIAL
Es el aumento de superficie o área que
experimentan aquellos cuerpos (placas,
planchas, láminas) en los que se consideran
dos de sus dimensiones como los princi
pales, debido al incremento de su tempera
tura. Experimentalmente se demuestra que
el incremento de área es directamente pro
porcional al área inicial (Ao) y al incremento
de temperatura ( AT).
*
*
*
*
*
Si*
*
*
<te
*
♦
*
*
*
*
*
*
$
* A A = P . A0 . A T
* Af —Ao = p . Ao .A F
* AF = A0 (1 + P . A T )
P: coeficiente de dilatación superficial,
depende de las propiedades térmi
cas del material
[ p ] = °C_1 , °K_1
Además.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-366-320.jpg)
![Consiste en el aumento en su volumen
que experimentan los cuerpos debido al in
cremento de la temperatura aquellos cuer
pos en que se consideran sus tres dimen
siones como los principales Experimental
mente se demuestra que el incremento en su
volumen es directamente proporcional a su
volumen inicial y al incremento de la tem
peratura
* V = y . Vo . A T
*V f - V 0 = y .V 0 . AT
* Vf = V0 . (1 + y . AT)
coeficiente de dilatación volumétri
co, depende de las propiedades tér
micas del material
Además:
[ Y] - °C-1 , °KT1
Y = 3 . a
Do =
m
Vo
.... (1)
Densidad final a la temperatura
“T + A T":
m
*
*
*
íji
#
m
*
*
*
*
*
*
*
*
*
*
$
*
*
*
m
$
m
fle
«
s
*
VARIACION DE LA DENSIDAD CON LA
TEMPERATURA
Un incremento en la temperatura de un
cuerpo, consigue un incremento de su vo
lumen, por consiguiente su densidad dis
minuye.
Densidad inicial a la temperatura T ":
Vf Voí1 + y -T)
La densidad final, Df es menor que la
densidad inicial D0.
CALORIMETRIA
CONCEPTO:
Es una rama de la física molecular que
estudia las medidas de la cantidad de calor
que intercambian dos o más sustancias que
están a diferentes temperaturas, y así mismo
analiza las transformaciones que experimen
tan dichas sustancias al recibir o perder ener
gía calorífica.
CALOR
Es una forma de energía, debido al mo
vimiento de las moléculas
El calor es una energía en tránsito (de
frontera a frontera) que intercambian los
cuerpos debido exclusivamente a la diferen
cia de temperaturas entre los cuerpos
*
#
*
*
$
*
*
*
*
*
A : cuerpo caliente
B : cuerpo frío
Q : cantidad de calor
Cantidad de calor (Q):
Es la medida de energía en forma de
calor, que ingresa o sale de un cuerpo. El
calor es un flujo energetico que fluye espon
táneamente desde el cuerpo de mayor hacia
el cuerpo de menor temperatura](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-367-320.jpg)






































![2) IF y =0 —
»F5 . Sen4£Í>=F2. Sen 4 Í+ F3
Luego:
2.K.q.Q ^ _ k q.q J K + k W -
L£ 2 " 2L2
Reduciendo: Q. V2~= q.
T +1
q = 5 [1 + 2 V2 ]
PROBLEMA Nfi 10
En los vértices de un triángulo
equilátero de lado 0,3m se han colocado
tres cargas eléctricas de magnitud: +Q; +
2Q; -3Q; donde: Q = 10j C Determinar la
fuerza resultante que actúa sobre la carga
“-t-Q". Considere sólo fuerzas eléctricas.
*
*
*
#
«
♦
*
*
*
*
*
*
*
*
*
*
*
*
#
♦
#
*
*
*
*
*
*
#
*
brío, luego; analizarnos la carga (4), J
donde: *
F3 = ^ ....(1) ¡
L *
F5 = K . 3^ = 2 K ay ....(2) *
L_ L m
o ♦
* *
F2 = K .a:- | .... (3)
2L *
*
Cálculo de las fuerzas F1 y F2 :
Q(2Q)
F1 = K . = 20 N
L2
Q(3Q)
F2 = K " = 30 N
L2
Cálculo de la fuerza resultante:
Fp = F^ + Fg+ 2Fi F2. Cos 120°
Reemplazando: Fr = 10V7 N
PROBLEMA N® 11
En ios vértices de un cuadrado se han
colocado cuatro cargas eléctricas, como
muestra la figura. Si "Q” se encuentra en
equilibrio, determinar la relación entre las
cargas: Las cargas "-q “ se encuen
tran fijos al plano.
SOLUCION:
Graficando las fuerzas eléctricas, sobre
la carga “Q“.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-407-320.jpg)































![kQ’A k_(Q_B + Q ’c)
(d + c)
kCte
c c
kQ’A
(a + d)
kQ’c
+ -------+
despejando:
Q'a _ (Qb + Q’c)
a (a + d) c (d + c)
... (1)
2. Analizando la ecuación (1). Si la
distancia "d' es muy grande (d —
»<*>)
entonces: (a + d) = (d + c), entonces
se deduce que:
Q’a (Qb + Q'c)
'2 ~ „2 .... (2)
Para nuestro caso particular; los
cuerpos están en contacto, enton
ces: d= 0. Reemplazando en (1):
Q’a (Qb + Q’c)
a2 ' c2
.... (2)
Porprincipiodeconservacióndelas
cargaseléctricas:
q final =q final
Qa +Qb +Qc =Q’a +Q’b +Q’c
Luego
Q’c = Qa + Qc - Q’a .... (3)
Reemplazando (3) en (2). tenemos
que:
D
«
*
*
*
*
Q’a= . [Qa + Qb + Qc]
Reemplazando en (3), tenemos:
C2. (Qa+Qc) a2 Qb
Q’c = -
(a2 + c2)
PROBLEMA N9 09
La figura muestra tres cuerpos de ra
dios de curvatura a = 3cm, b = 4cm y R.R.
La esfera de radio R y carga Q = 25uC, se
encuentra dentro del cascarón de radio
"b", aislados eléctricamente ambos cuer
pos. Los cuerpos de radios a y b no
tiene carga eléctrica. Sabiendo que la es
fera de radio "a” se pone en contacto con
el cascarón de radio "b “ y tiempo después
se separa. Hallar la carga final de los
cuerpos A y B.
*
«
le
*
*
*
*
*
*■
*
*
*
*
*
*
*
1. Cuando ponemos en contacto los
cuerpos de radios a y b, se esta
blece un flujo de cargas eléctricas a
través del punto de contacto, de ma
yor a menor potencial El flujo de
cargas (positivas) cesa cuando los
potencíales de los cuerpos en con
tacto se hacen iguales. En éstas
condiciones las cargas eléctricas se
reparten directamente proporcional
al cuadrado de los radios de cur
vatura, teniendo en cuenta que los
cuerpos de radios b y R forman un
solo cuerpo, se cumple que
Q’a (O + Q’b)](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-440-320.jpg)

![*
*
*
*
*
«
ti
SOLUCION:
1. La capa esférica se polariza, de modo
que en la superficie de radio "a" se
induce una carga "-q" y en la superfi
cie de radio "b" se induce una carga
"+q''; la carga neta de la capa es igual
a cero, por consiguiente la capa es
férica genera un potencial eléctrico en
el punto "O".
Vo = k fc 9 í+ k £ a í
a b
V0 = -
4nE0
.... (I)
2. El trabajo realizado por un agente
externo contra las fuerzas eléctricas
es igual al producto de la carga "+q"
que se traslada por la diferencia de
potencial entre el punto inicial (0) y
el punto final ( ) . Pero en el infi
nito el potencial eléctrico es igual a
cero entonces:
W0 -»« =q(Vc —Vo)=-q . V0 ....(II)
Reemplazando (I) en (II), tenemos:
*
*
*
<
je
*
*
*
*
*
*
*
*
*
*
*
*
«
t=
*
*
<
#
*
*
#
*
*
*
*
*
*
*
*
«
i»
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
«
tí
*
*
stf
«
t=
*
*
Se tiene un anillo de radio "R" cargado
con magnitud "+q" uniformemente dis
tribuido en el anillo. Sabiendo que el anillo
se encuentra en el plano x - y con centro
en el origen de coordenadas, hallar el po
tencial eléctrico en un punto de eje del
anillo P(0; 0; d) y en el centro (0; 0; 0)
SOLUCION:
1 Cada diferencial de carga Aqi ; Aq2¡
Aq3;..., Aqn, del anillo genera un po
tencial en el punto P. La distancia
entre el punto P y cada diferencial de
carga es constante igual a :
2. El potencial en el punto "P" será:
VP =K.
A q i A qj Aq_
3 Aqn
D D D D
K
VP= - [A q, + Aq 2 + Aq 3 +...+ Aq n]
Pero:
q =Aq1 +Aq2 +Aq3 + ... + Aqn
Luego: VP= ^ ....(2)
Reemplazando (1) en (2) tenemos](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-442-320.jpg)


![SOLUCION:
1 La energía potencial de interacción
eléctrica del sistema, es igual al tra
bajo realizado por un agente externo
para llevar desde el infinito hasta los
vértices del triángulo las cargas: + q ;
+ 2q; -3q.
Su valor se determina mediante la
fórmula (1 ), donde se considera el
signo de las cargas.
d l2 = dl3 = d23 = L
(2) * + 2 q
Ep =k
q,q:
(3)
-3q
d ,
<12 '-‘ 13 VJ 23
Reemplazando valores y signos en (1):
„2
. [ 2 - 3 - 6 ]
EP = ^ _
PROBLEMA Ns 03
En el sistema mostrado, la energía de
interacción de las cargas puntuales, si
tuadas en los vértices del cuadrado de
lado "L" es igual a :
>+ q
*
*
*
*
*
*
*
*
*
N
e
*
N
<
*
*
*
*
N
*
*
*
*
*
*
*
*
*
*
*
N
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
N
»
N
s
*
*
*
*
*
*
*
*
¥
*
*
N
?
N
i
*
*
*
*
*
*
s
ü
*
*
*
*
*
*
*
N
»
N
f
*
1. La energía potencial de interacción
eléctrica del sistema, es igual a! tra
bajo realizado por un agente externo
para llevar desde el infinito hasta los
vértices del cuadrado las cargas eléc
tricas. Su valor se determina medi
ante la fórmula (1), donde se con
sidera el signo de las cargas, además
las distancias de separación son
d i2 = d i3 = d24 = d34 = L
dt4 = d23 = L . 2
( l)
+ q
I '
I
i
i
í
L !
i
i
I
(2 )
(3)# 1
-q
pn _ u q iq 2 x q i-q 3 . q ^ q ^ «
tp - K , + . + , +
d i2 d i3 di4
q2-q3 q2-q4 + q3-q4
d23 d24 d24 (1 )
2. Reemplazando valores y signos en
(1 ):
L
Ep =
Luego:
Ep = -^2
- n - q](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-445-320.jpg)









![Pero por otro lado sabemos que:
V = E . d ....(3)
Reemplazando (3) en (2):
U 0 =^
2. V.q
m 1
ASOCIACION DE CONDENSA
DORES
CAPACIDAD EQUIVALENTE (Ceq).
Se denomina así a aquel único conden
sador capaz de reemplazar a un conjunto de
condensadores, acumulando la misma can
tidad de energía que el conjunto de conden
sadores.
El condensador equivalente debe encon
trarse sometido a la misma diferencia de
potencial "V" que los dos puntos que limitan
al conjunto de condensadores reemplaza
dos.
1. EN SERIE. Cuando dos o más conden
sadores están instalados en serie, todos
ellos acumulan la misma cantidad de car
ga independiente de sus capacidades.
C, C, c , Qg
*?] [i
0
— (v)—
♦
*
*
*
*
*
$
*
*
*
*
*
*
*
*
*
*
*
*
*
*
Sistema Equivalente
La carga en cada condensador es el
mismo, q - Constante
Todos los condensadores almace
nan la misma carga.
La energía que entrega la Fuente
(Pila o batería) es igual a la suma de
energía acumuladas por cada con
densador.
V = - 9 - V i= - 9 -
Ce ’ Ci '
V3 = ^ -
C3
iv) Reemplazando (2) en (1) •
_ 9 _ _ _ 9 _ + -S - + -SL
Ce C1 C2 C3
Luego:
J _____1_ J _ _1_
Ce C1 + C2 + C3
EL PARALELO. Cuando dos o más conden
sadores están instalados en paralelo, todos
ellos están sometidos a la misma diferencia
de potencial "V" o tensión, por consiguiente
la carga acumulada por cada condensador
es directamente proporcional a su capaci
dad.
- I b
■ ® _ j
*
*
*
*
*
i) La diferencia de potencial entre las ar
maduras es una constante, inclusive del
capacitor equivalente.
V = constante
ii) Por principio de conservación de las car
gas eléctricas, la carga que entrega la
fuente (pila o batería) es acumulada por
los condensadores.
q = q i + q 2 + q3 .... (1 )
iii) Pero:
q = V . Ceq ' qi = V . C r](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-455-320.jpg)























![C 2 = £ . £,
A.a
° d.b
(4)
Reemplazando (3) y (4) en (2):
PROBLEMA Ne05
Dos esferitas de masas "m", radios,
cargas “q" iguales y de densidad “pe" que
penden de un mismo punto y de hilos de
igual longitud se sumergen en un dieléc
trico líquido, cuya permeabilidad eléctrica
es igual a “e“ y su densidad " p l " . Sabi
endo que los hilos forman un ángulo "
theta " respecto de la vertical y las esferi
tas están separadas una distancia "d",
hallar la magnitud de las cargas.
F =
_
e d2
, T = tensión.
s*
*
*
*
*
5
Ü
*
*
*
*
*
*
*
*
*
*
SOLUCION:
1. Realizamos el diagrama del cuerpo
libre de la esferita de la izquierda,
donde:
E = empuje = g . pl . V
W = peso = g . pc . V
*
*
*
*
*
*
*
*
*
*
<
¥
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
2. De la primera condición de equili
brio:
ZFX= 0 =* T Sen 0 = F . . . (1)
IF y = 0 => TCose + E ? W
i
=> ECos e= W-jE .. .(2)
Dividiendo las ecuacionps;(1): (2):
T9e = ^ - K j 2 1
W -E Ed2 gV(pc-pL)
Pero: P c = -
m
V =
m
Pc
T g e = ^ ¿
pc
e . d m 9 (Pc-PL)
Despejando:
q
2=f d2 (mg)!1
-^] Tg6
K pc
PROBLEMA Ne 06
La figura muestra dos condensadores
de igual forma geométrica instalados en
serie, sometidos a una diferencia de po
tencias entre los puntos 1 y 2. dos esteri
llas cargadas con igual magnitud "q", de
igual radio y peso, suspendidos de hilos
de seda de igual longitud, se encuentran
entre las placas del capacitor.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-479-320.jpg)






![metálicos la corriente la crea el movi
miento ordenado de los electrones que
se desplazan en sentido contrario al de la
corriente.
En principió, el sentido de las líneas de
fuerza del campo electríco E se dirige de
mayor a menor potencial, del mismo modo
las cargas eléctricas libres positivas se des
plazan de mayor a menor potencial eléctrico.
En el caso del conductor metálico los elec
trones se desplazan de menor a mayor po
tencial eléctrico, esto significa que se mue
ven en sentido opuesto al campo eléctrico.
Si el campo eléctrico que actúa sobre las
cargas eléctricas libres se mantiene cons
tante en módulo y dirección se obtiene una
corriente continua (C.C). Si el campo eléc
trico se mantiene constante en dirección y
módulo variable y si el campo eléctrico cam
bia enintensidad y dirección se obtendrá una
corriente alterna (C.A).
C. C : Corriente debido a las pifas y
batérías
C. A : Corriente debido a las hidroeléc
tricas (de uso doméstico)
Convencionalmente en el desarrollo del
capítulo consideraremos cargas eléctricas li
bres a las cargas positivas, esto significa que
el flujo de cargas eléctricas será de mayor a
menor potencial eléctrico, por consiguiente el
sentido de la intensidad de corriente será de
mayor a menor potencial.
Además en los fenómenos y leyes que
estudiaremos vamos a considerar que la
comente eléctriica es contíinua.
1. INTENSIDAD DE LA CORRIENTE
ELECTRICAfri. Es aquella magnitud es
calar que nos expresa la cantidad de
carga neta que en la unidad de tiempo
atravieza la sección recta de un conduc
tor. La corriente eléctrica se dice que es
continua.
(C.C) si su intensidad y sentido no varían
con el tiempo:
. 1 Coulomb
1 ampere = ~ -------- r
1 segundo
La intensidad de corriente se mide en
ampere (A) en honor al físico francés
Andrés María Ampere (1 775 - 1 836).
2. RESISTENCIA ELECTRICA (R). Es la
dificultad que ofrece un cuerpo conductor
al desplazamiento de las cargas eléctri
cas a través de su masa.
Notación :«
—
i >
_» •—
pwvwvh—
•
La resistencia eléctrica de un conduc
tor se mide en Ohm (Í2) en honor al
físico Alemán Jorge Simón Ohm (1
787 - 1 854)
LEY DE POULLIET.
"La resistencia eléctrica que ofrece un
conductor al paso de la corriente eléctrica
es directamente proporcional a la longi
tud del conductor "L" e inversamente pro
porcional al área "A" de la sección recta”
p : resistividad eléctrica
[p ] = í i m
3. RESISTENCIA ELECTRICA (p). Llama
da también resistencia específica de un
conductor, es aquella que nos expresa la
capacidad de formar dentro de una sus
tancia una corriente eléctrica bajo la ac
ción de un campo eléctrico La resisti
vidad caracteriza las propiedades eléctri
cas de los conductores.
*
#
*
*
*
0
*
♦
*
♦
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
#
*
*
*
*
«
Ü
#
*
*
*
*
#
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
♦
*
*
*
*
*
*
$
*](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-486-320.jpg)








![Por consiguiente las resistencias
entre los puntos "M“ no funcionan
Reduciendo tenemos:
3. Cálculo de la resistencia equiva
lente:
3R/8 3R/8
M G
Luego: Req = | R
FUENTES DE ENERGIA
ELECTRICA
Se denomina así a todo aquel dispositivo
que se emplea para convertir alguna forma
de energía (térmica, química, mecánica, nu
clear) en energía eléctrica libres para des
plazarse a lo largo de un tramo del circuito
eléctrico. Toda fuente de energía eléctrica
(corriente continua), tiene dos zonas bien
definidas denominados bornes o polos, lla
mándose polo positivo (+) al que se encuen
tra a mayor potencial y polo negativo (-) al
que se encuentra a menor potencial.
En las pilas voltaicas o acumuladas du
rante la transformación de energía ocurren
ciertas reacciones químicas, la corriente
eléctrica se debe al movimiento ordenado de
los iones positivos y negativos en ia solución
iónica.
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
#
é
*
*
*
m
*
#
*
*
*
*
*
*
s
tí
*
*
*
*
*
*
*
REPRESENTACION DE LAS FUENTES
DE TENSION
1. Pila Ideal: Tiene resistencia interna
idealmente nula (T = 0)
4 r Vb a =£
2. Pila Real: Tiene resistencia interna di
ferente de cero ( r * 0)
Cálculo de la diferencia de potencial en
tre los puntos A y B debido al paso de la
corriente V .
Vba = £ —¿. r
3. Generador de Tensión:
— 8
Vb - Va = Vba = £
FUERZA ELECTROMOTRIZ [f.e.m], (£)
CONCEPTO.
Es una magnitud física escalar, su valor
se define como el trabajo realizado por la
fuente de energía (pila, batería, generado
res) sobre cada unidad carga libre positiva
para trasladar desde el borde negativo (-)
hacia el borne positivo (+), en este caso la
unidad carga gana o recibe una energía ,,+e“.
Cuando la unidad de carga libre positiva (+)
se desplaza desde el borne positivo (+) hacia
el borne negativo (-) pierde una energía igual
a "-e”.
o](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-495-320.jpg)



















![3. Teorema de la trayectoria:
1 -> 0 -> 3
V-| —10. 1 ~ 30 . t 3 = V3
i 3 = (1 - 2/ 1)/6 .... (y)
Reemplazando (p) y (y) en (a ):
i 1 = 0 , 2 A ; t2 = 0,1 A; / 3 = 0,1A
PROBLEMA N®18
En el circuito eléctrico mostrado, la
fuerza electromotriz £ = 22,1 V tiene una
resistencia interna r = 1 ohm, además R =
10 ohm. Calcular la diferencia de lecturas
en el voltímetro ideal de resistencia in
terna infinitamente grande y el voltímetro
real de la figura.
-o>A«-c
SOLUCION
1 En el 1er caso: Rv = 00
2da. Ley de Kirchhoff:
£ -< . ir +n ....(a)
De la ley de Ohm.
V a b = V, =,;. R .... (p)
Reemplazando (a) en (P):
Vi = £ . - =>
(R+r)
Vi = 20,09 voltios
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*¡*
*
*
*
S
Ü
#
*
*
*
r
r
R, Rv
(R+Rv)
2da. Ley de Kirchnoff:
R .R v
£ = I . r + -
(R + Rv)
De la Ley de Ohm :
.... (y)
Vab = V2 - I .
..R Rv
(R + Rv)
.... (6)
Reemplazando (y) en (0):
V2 = £ . R R v
[r. R + R. Rv + r. Rv]
Reemplazando valores:
V2 = 20voltios
3. Luego la diferencia de lecturas:
AV = V1 - V2= 0,09 voltios
PROBLEMA Ne19
En el circuito eléctrico mostrado, ha
llar las lecturas en los amperímetros igua
les A i, A2 y A3.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-516-320.jpg)


























![Por principio de conservación de las car
gas eléctricas:
Zq (inicial) = Xq (final)
8 x lO ^C = | + q
Luego:
q = 6 . ICT^C
PROBLEMA Nc 34
Un condensador de placas paralelas
de capacidad 6|¿F es cargado con 12^0.
Este condensador se conecta a un con
densador de capacidad 2iF descargado,
como indica la figura. La carga que al final
se adquiere el condensador de 2nF será:
2W
F
*
*
*
*
*
*
a) 3nC b) 4iC c) 6|iC
d)8nC e) N A.
PROBLEMA N® 35
En el circuito electrónico mostrado,
determinar la carga acumulada por el ca
pacitor 3(.iF.
2l
.F
Cuando dos o más condensadores están
instalados en paralelo, las cargas acumu
ladas son directamente proporcionales a
sus capacidades.
2wF
Hí—
2q
-íl-
3viF
H h -
4uF
Cuando dos o más condensadores están
instalados en serie, todos los condensa
dores almacenan igual cantidad de carga
independientemente de sus capacida
des:
*
a
*
#
*
#
«i
*
*
*
*
*
*
*
6pF
—fl—
3pF
-II—
2wF
-II-
3q 3q B 3q B
Analizando el condensador equivalente.
^TOTAL = V AB •^eq
3q = 30V . 2[iF
q = 20]iC
La carga acumulada por el capacitor 3|iF
es "3q", o sea: 60(iC.
í PROBLEMA Ns36
*
m
*
En el circuito eléctrico mostrado, de
terminar la carga acumulada por el ca
pacitor C = 1|iF.
C
6v
jF
5uF
H i -
4V
- .1+
*
*
*
*
a) 1pC
d)4nC
b) 2|iC
e) Ninguna
c) 3p.C](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-543-320.jpg)



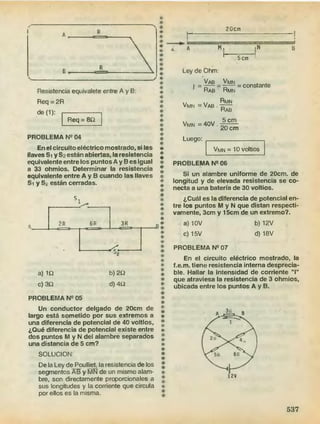












![LEYES DEL MAGNETISMO
Ley Cualitativa.
"Los polos magnéticos externos, del
mismo nombre se repelan y los de nombre
diferente se atraen''
Ley Cuantitativa.
“Las fuerzas desarrolladas entre polos
magnéticos son directamente proporciona
les al producto de las intensidades de los
polos magnéticos e inversamente proporcio
nales al cuadrado de ia distancia que los
separa”
donde:
p = K mg
*
*
m
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
K= H
o = i0-7 N
4 n a 2
La magnitud [Lo(n es una letra griega que
se lee 'MU”).
Se denomina constante magnética, su
valor es:
|io = 4n . K = 4n . 10‘
- 7 N . Wb
A.m
|io = 12,6. 10”7 — ó 4
m A£
Unidad de la Intensidad de Polo Magnético
Amper x metro (A.m):
m :
K
Fuerza de atracción o repulsión
magnética.
Intensidad de los polos magnéticos
o llamada masa magnética.
Distancia de separación entre polos
magnéticos externos.
Constante, su valor depende del sis
tema de unidades.
Permeabilidad magnética, no tiene
unidades, su valor depende del me
dio donde están situados los polos
magnéticos.
Unidades:
m F d K
S.l. A.m Newton m 1 0 - 4
A"
Constante magnética (no)
El coeficiente "K" en el sistema interna
cional (S.l.) puede escribir, en la forma:
*
*
*
*
*
*
*
#
*
*
*
*
*
#
*
*
*
*
*
*
*
*
*
*
*
*
*
*
En el Sistema Internacional (S .l) se de
fine como la masa magnética que ac
tuando sobre otra igual en el vacio y a un
metro de distancia se repelen con una
fuerza de 10 ?N
La permeabilidad magnética en el vacío
es igual a la unidad (n = 1) y que en el aire
posee aproximadamente el mismo valor.
[masa magnética] = [A.m]
CAMPO MAGNETICO
CONCEPTO.
Es propiedad de la materia como con
secuencia de las cargas eléctricas en mo
vimiento. El campo magnético es el lugar
geométrico donde el imán deja sentir sus
efectos magnéticos sobre otro cuerpo que
tiene masa magnética o sobre cargas eléctri
cas en movimiento (corriente eléctrica).
LINEAS DE FUERZA.
Son aquellas líneas geométricas que sir
ven para representar gráficamente el campo
magnético. En el caso particular de un imán
las líneas de fuerza salen del polo norte (N)
e ingresan al polo sur (S), convensional-
mente.
F
ci](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-560-320.jpg)

![Hi: debido al polo Norte.
H2; debido al polo Sur
m0: masa magnética Norte de prueba.
H = H1 + H2
En el caso de un imán sus masas mag
néticas norte y sur son iguales
M
n
orte—
M
sur=M
Par de fuerzas o cupla sobre un imán
recto en un campo magnético externo se
origina una fuerza sobre el polo norte y otra
sobre el polo sur, de igual magnitud y de
sentidos opuestos, tendiendo a alinearse con
el campo magnético uniforme externo, for
mando una Cupla cuyo valor es igual al pro
ducto de una de las fuerzas por la distancia
perpendicular entre las fuerzas.
Unidades
d F C
MKS mt. Newton Newton-mt
c.g.s cm. dina dina-cm
*
*
*
*
*
*
*
*
*
*
*
*
♦
*
*
*
*
#
*
♦
*
*
♦
*
*
*
*
*
*
#
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
¡9
*
*
*
♦
*
*
♦
♦
*
*
*
*
*
*
*
*
*
*
%
*
*
*
*
*
*
*
1. De la definición de la intensidad del
campo magnético:
H =
M
F = M . H .... (2)
2. Reemplazando en la ecuación (1)
L = M .H d .S e n 0 .... (3)
3. Se debe observar que si 9 = 0 ° entonces
la cupla es nula
4. Analizando dimensionalmente la ecua
ción (3), en el Sistema Internacional:
[C] = [M ]. [d] [H ]. [Sen 0 ]
N.m = A.m . m . — 1
m
1N = A .... (4)
FLUJO MAGNETICO ($)
Se define como el producto de la intensi
dad del campo magnético H por la superficie
A perpendicular a las líneas de fuerza del
campo.
<
j>= H.A
<
¡>= número de lineas de fuerza
Si la superficie es inclinada con respecto
a las líneas de fuerza, entonces:](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-562-320.jpg)
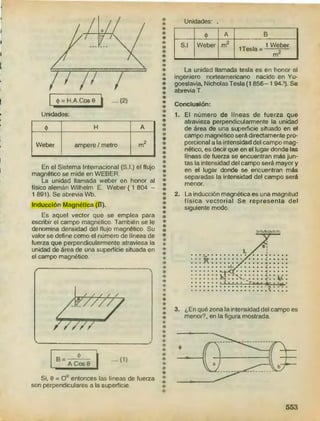
























![4jta 4nb 8a 8b
„.(2)
Hi: Campo creado por la semirecta
de conductor (i¿)
H21 Campo creado por la semirecta
de conductor (17)
H3‘ Campo creado por el arco de con
ductor de radio de curvatura "a"
H4: Campo creado por el arco de con
ductor de radio de curvatura “b”.
Luego:
H = (1 i V l J_
a r b )|8 ' 4n
Serepresentaporunvectorsalíen-
dodelpapelporelpunto'V
PROBLEMA 5
En el circuito mostrado circula una
corriente eléctrica de intensidad V deter
minar la intensidad del campo magnético
en el punto "o", considere conocido el
radio de curvatura “a" y los segmentos de
longitud "2a".
Sugerencia: Tang
SOLUCION:
— 1= -
( 2 r *
1 La intensidad del campo magnético
en el punto “o" es igual a la super
posición de campos de
#
*
#
*
*
*
*
*
*
+
*
*
*
#
s
*
*
*
*
*
íf¡
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
$
+
*
#
*
*
*
*
*
*
*
*
*
*
*
♦
i
*
¡k
*
*
«
e
*
*
*
*
*
*
*
2. H =H arco (a) - H (segmento BC)
- 2 . H (segmento AB)
H ~ 2.Sen
4n a 4n 2a
[53^
2
- 2 . — . — .Sen
4n a 2
3. Luego:
VF 4Vüf
7£ —--- ---- 1
—
5 5
H - 7 - “ .[íi- V 5 ]
4jt a
S I
Se representa por un vector sa
liendo del papel por el punto “o".
B
PROBLEMA 6
En el circuito mostrado circula una
corriente eléctrica de intensidad " l" deter
minar la intensidad del campo magnético
en el punto "o", considere conocido los
radios de curvatura “a" y "b", los conduc
tores en dirección de los ejes X e Y son
infinitamente largos.](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-588-320.jpg)









![Fi es la fuerza con que actúa la
corriente I sobre AD es:
Fi =
Uo
2rtX
F2 es la fuerza con que actúa la
corriente I sobre BC es.
F2 =
Ho
2n (x + h)
a . Ii
3. Las fuerzas Fi y ¥2 están dirigidas a
lo largo de una recta en sentidos
opuestos siendo F1 > F2 Por lo tan
to, el circuito se atraerá ai conductor
rectilíneo con una fuerza:
F r =Fi.F2= — . a . I
2n 4 1- - y
[x x + hj
en el S.l
¡J
FUERZA DE LORENTZ
]
3. Movimiento de las partículas cargadas en
los campos eléctricos y magnéticos:
3.1.
3.2.
El campo magnético actúa no sólo
sobre los conductores con corriente,
sino también sobre las partículas
aisladas con carga eléctrica que se
mueven en él.
La fuerza magnética "F" que actúa
sobre la carga eléctrica "q" que se
mueve en el campo magnético con
la velocidad "V", se llama Tuerza de
Lorentz".
_ ^= q ^ v ^ E ^ S e i^e J | .. . (1)
3.3. El módulo, de ia fuerza magnética,
expresada en (1 ), tiene las siguien
tes unidades en el sistema interna
cional.
F q V B
Newton Coulomb
m
s
Weber _ .
----- 5—= Testa
m
*
*
*
o
♦
*
*
*
*
*
*
xt
*
*
*
*
♦
*
*
*
*
*
*
*
*
*
$
*
*
*
*
*
«
*
*
*
*
*
*
*
*
*
*
*
*
♦
*
*
*
*
*
*
*
*
*
*
♦
*
♦
■
*
$
La dirección; de la fuerza magné
tica sobre la carga eléctrica positiva
"q" es perpendicular al plano deter
minado por el campo magnético y la
velocidad de la carga eléctrica.
3.5 Ei sentido, de la fuerza magnética
se determina aplicando la regla de
la mano derecha. Los dedos se ha
cen girar del sentido de la velocidad
hacia el sentido del campo mag
nético a través del menor ángulo "6”,
el pulgar indica el sentido de la fuer
za magnética.
3.6. Si la carga eléctrica en movimiento
tiene carga negativa q“ se pro
cede del mismo modo, pero la fuer
za magnética tendrá sentido opues
to.
3.7 La fuerza de Lorentz está siempre
dirigida perpendicularmente a la ve
locidad de traslación de la partícula
cargada y le comunica a esta una
aceleración normal o centrípeta.
Como no hace que varíe el módulo
de la velocidad, sino que solo cam
bia su dirección, la fuerza de Lorentz](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-598-320.jpg)

















![que toda la carga está concentrada en el
centro de curvatura, entonces el sistema
se reduce a la interacción de una carga
puntual “q“ con el cascarón de radio "b"
cargado con magnitud "Q".
Q=AQi +AQ2+AQ3+ ... +AQn
U12 :Energía de interacción elec
trostática.
U12: ^ [AQi + AQ2+ AQ3+
D
+AQn]
U12= k ^ .... (2)
- ! • a b b
V(tierra) —
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
La energía eléctrica total del sistema
es igual a:
U = Ui + U 2+ U 12
POTENCIAL DE TIERRA
Consideramos "Tierra" como un conduc
tor esférico de radio "R" muy grande (R -» ~),
para valores de cargas comunes en elec
trostática (microcoulomb a lo más) el poten
cial de este gran conductor esférico es igual
a cero.
Cualquier cuerpo conductor conectado al
gran conducto esférico Tierra, tomará de (o
cederá) Tierra las cargas necesarias para
que el potencial eléctrico de ambos sea igual
a cero. El potencial de Tierra no se modifica
cuando gana o pierde electrones Luego: el
potencial eléctrico de cualquier cuerpo con
ductor conectado a Tierra es cero.
1. La figura (1) un cuerpo conductor "A" con
carga inicial "qo", alrededor del cual no
hay otras cargas, se conecta a Tierra,
entonces'al final de la carga es igual a
cero entonces decidimos que el cuerpo
"A“ se ha descargado.
4tce0 R
= 0
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
$
*
*
*
*
*
*
*
*
*
*
*
*
*
*
2. La figura " 2 " muestra un cuerpo conduc
tor "B", inicialmente neutro alrededor del
cual hay un cuerpo "C" cargado con mag
nitud “Q", puede haber mas cuerpos car
gados, luego "B“ se conecta a Tierra.
Entonces el cuerpo “B" y Tierra forman
un solo gran conductor neutro y debido a
la presencia de “C" cerca de “B“, las
cargas del conductor ib + Tierra) se re
distribuyen de tal manera que en ”B" hay
cargas de signo contrario a “O" y en la
Tierra cargas del mismo signo de Q pero
muy alejadas, osea neutralizadas. El
cuerpo “B“ conectada a Tierra y por lo
tanto con potencial eléctrico CERO, tiene
ertonces carga neta NO nula
Hemos explicado así que un conductor
conectado a Tierra (“
B*i siempre el po
tencial es NULO, pero la <
: ?.rg<j neta no es
necesariamente nula](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-616-320.jpg)









































![El tiempo registrado por un reloj que se
mueve junto con un cuerpo [péndulo] en
el que transcurre algún proceso, se de
nomina “tiempo propio" de este cuerpo y
se designa por T . Como se puede obser
var de la relación anterior el tiempo propio
es más corto.
"Los relojes en movimiento acelerado,
respecto a otro, marchan más despacio
que los estacionarios”.
Cálculos detallados, que salen de los lí
mites de la teoría especial de la Relativi
dad, muestran que el reloj que se mueve
con aceleración, marcha con mayor len
titud, respecto a otro estacionadp.
PROBLEMA
Dos hermanos mellizos a la edad de 20
años se separaron. Uno de ellos, A sale en
un cohete hacia una estrella, con velocidad
V3
constante V = — C. y el hermano B, se
queda en el planeta Tierra llevando una vida
normal
Cuando el hermano A llega al otro sis
tema estelar, otro planeta, su reloj indica un
intervalo de tiempo igual a 30 años
Edad de los mellizos A y B 20 años.
r
1 986 i
£
1 le
4
H í ■ ■ -
I . .....
*
*
♦
*
*
*
*
*
*
*
*
*
*
*
*
*
♦
*
*
*
*
*
*
*
*
#
*
*
i
*
+
*
*
*
#
*
*
*
*
*
*
#
*
*
*
*
*
*
$
*
*
*
*
*
*
*
*
*
Los hermanos A y B se despiden en 1 986
cuando ambos tienen la misma edad, 20
años, y tienen relojes idénticos.
El mellizo A llega al otro planeta en el año
2 016 respecto al sistema de referencia iner-
cial [S'] ligado al cohete T = 30 años. Según
la transformación de Lorentz, el tiempo trans
currido para el hermano B será:
T =
T
V i - p 2
. - ( 1 )
En este caso
p = — = —
p C 2
Reemplazando en (1):
30 años
T = ■
0,5
Cuando A llegó al otro planeta, B en la
Tierra tiene 80 años, respecto a “S".
En otro planeta, bajo otro cielo el her
mano A. Edad = 50 años.
r
L / ;
2 016
■ •
En la tierra el hermano B.
Edad = 80 años.
^------- ------¿
n;
2 076
í » . .](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-658-320.jpg)


![- Señalemos que no se puede escribir
la fórmula:
Ek =
mV
Donde m es la masa relativista.
PROBLEMA N» 1
Una partícula en reposo tiene una ma
sa m0= 1,0 kg, si la partícula se mueve con
una velocidad constante, v = ^3. C/2 ,x
cuál es el valor de su energía cinética,
respecto al observador [S].
SOLUCION:
Masa en reposo: m0 = 1,0 kg.
Fórmula de la energía cinética relativista:
Ek = ( m - m 0) C 2 ....(1)
Calculo de la masa relativista:
m0
m = -
1 - p 2
Donde:
R - Y - 2 Ü
.... (2)
Reemplazando datos en (2):
m
1,0 kq.
4
La masa se duplica respecto a m0
Reemplazando en (1):
$
<*
*
*
«
*
*
*
#
+
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
<
s
*
#
*
*
#
*
*
*
♦
*
*
*
#
*
*
*
*
*
*
*
*
*
m
*
*
*
*
*
*
*
*
*
Ek = (2kg - 1kg). 32 . 1016 ~
s
Ek = 9 . 10,6J
Debemos recordar que:
C = 3 . 10e m/s
PROBLEMA 2
¿Qué trabajo es necesario realizar pa
ra aumentar la velocidad de una partícula
de masa en reposo m0 = 1 gramo desde
Vi = 0,6C hasta V2 = 0,8C
Aplicando el teorema de la energía ci
nética conocido en mecánica clásica- “El
trabajo realizado por todas las fuerzas es
igual a la variación de la energía cinética".
W = Ek(final) - Ek(inicial) .... (1)
Pero la energía cinética relativista es:
Ek = (m - m0) C2
Reemplazando en (1):
W = (m2- m0)C2 - (mi - m0)C2
W = ( m 2 - m i ) C 2 ....(2)
Cálculo de la masa relativista:
ÍTÍq ITio m 0
mi =
rr»2=
V í —0,36 0,8
m0 m0 mQ
/1 - 0,64 0,6
V2 V2
2 1 P 2
PI = - 2 =0,36, p‘ = - f =0,64](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-661-320.jpg)
![E0 = M0 . C2 .... (3)
5) Ley de Interacción de la masa y la
energía:
Albert Einstein llegó a la siguiente deduc
ción fundamental:
La energía tota! del cuerpo (o sistema de
cuerpos), independientemente de que ti
po de energía ella se componga [cinética,
eléctrica, química, etc.], se liga con la
masa de este cuerpo por la relación:
E = M . C 2 ....(1)
E : energía total del cuerpo,
m : masa relativista del cuerpo,
c : velocidad de la luz en el vacío.
Para evitar incompresiones prestamos
atención que en la energía total E no se
incluye la energía potencial del cuerpo en
el campo externo, si tal actúa sobre el
cuerpo
- Esta fórmula expresa una de las
leyes más fundamentales de la na
turaleza.
- Se puede escribir de otro modo la
energía total del cuerpo:
E = Mo. C2 + Ek .... (2)
m0 es la masa en reposo del cuerpo.
Ek : es la energía cinética del cuerpo
- De aquí (2) se deduce directamente,
que el cuerpo en reposo (Ek = 0)
también posee energía.
*
#
“Esta energía se denomina energía de
reposo o energía propia".
Vemos, que la masa de un cuerpo que en
mecánica clásica actuaba como medida
de ia inercia (en la segunda Ley de New
ton) o como medida de acción de gravi
tación (en la Ley de gravitación univer
sal), ahora actúa como una nueva fun
ción, o sea, como la medida del Conteni
do de energía del cuerpo.
Incluso el cuerpo en reposo posee según
la Teoría de la relatividad, reserva de
energía, es decir, la energía de reposo.
¿Qué, energía de reposo posee una par
tícula cuya masa en reposo es m0 = 1
gramo?
De la ecuación:
Eo = m0 . C2 =1 g 32 . 1016—
Eo = 9 . 1013J
Es la energía en reposo .. imagínate.
La variación de la energía total del cuerpo
(o del sistema de partículas) va acom
pañada por la variación equivalente de su
masa.
(mi - m¡) =
( E f - E ¡ ,
Durante los procesos macroscópicos co
munes la variación de la masa del cuerpo
es extraordinariamente pequeña, inac
cesible para la medición.
Esto se puede ilustrar en los siguientes
ejemplos:
1er. Ejemplo:
Para lograr un satélite de masa m0 = 100
kg. a la órbita alrededor de la Tierra, le
comunicamos la velocidad de V = 8 km/s.
Esto significa, que su energía aumenta
en:
.(1)
El aumento correspondiente de la masa
del satélite será:
Am =
A E m0 V
(2)](https://image.slidesharecdn.com/pdf-220526230729-267c1715/85/pdf-pdf-662-320.jpg)



































































