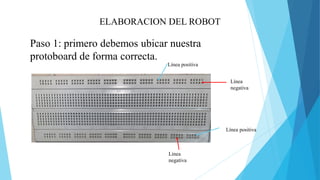
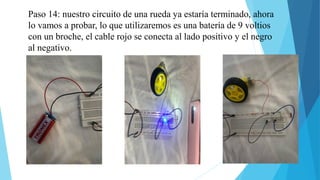
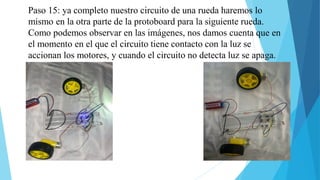
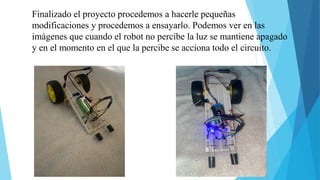
Este documento proporciona un paso a paso para construir un robot seguidor de luz utilizando materiales como resistencias, transistores, fotorresistencias, motores y LEDs. Explica 15 pasos para construir el circuito de cada rueda usando estos componentes y conectarlos a una batería para que el robot siga la luz. Finalmente, une los circuitos de ambas ruedas en la placa de pruebas y realiza pruebas para verificar que el robot funciona siguiendo la luz.