Descargar para leer sin conexión


![PRINCIPIOS FUNDAMENTALES DEL ANÁLISIS ESTRUCTURAL
Teoría General de las Estructuras I
Prof. Octavio García Domínguez
7
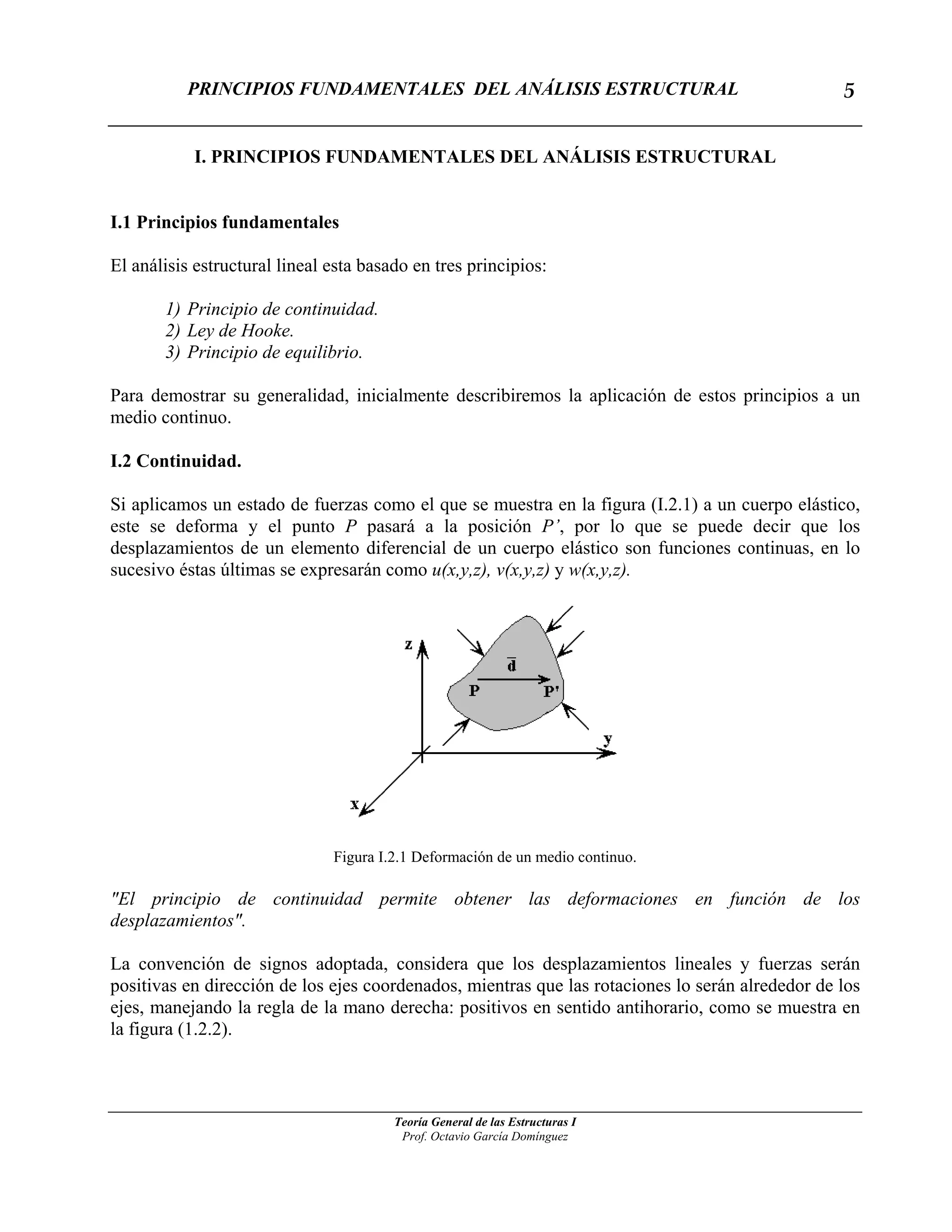
De esta manera, conocidas las funciones de desplazamientos u, v y w, podemos conocer las
funciones de deformación (tanto lineales como angulares).
Expresando las ecuaciones de deformación en forma matricial, se tiene que:
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎪
⎪
⎪
⎪
⎭
⎪⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪⎪
⎪
⎪
⎨
⎧
w
v
u
yz
xz
xy
z
y
x
yz
xz
xy
z
y
x
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
γ
γ
γ
ε
ε
ε
0
0
0
00
00
00
( I.2.3)
Estas mismas ecuaciones en forma condensada resultan:
{ } [ ]{ }dAe = ( I.2.4)
La expresión (I.2.4) es la ecuación fundamental del principio de continuidad.
Donde:
{e} = Es el vector de deformaciones tanto lineales como angulares.
[A] = Es operador matricial que relaciona las deformaciones con los desplazamientos.
{d} = Es el vector de desplazamientos u, v y w sobre los ejes x, y y z respectivamente.
I.3 Ley de Hooke.
Este principio se refiere al estudio de la relación entre las fuerzas internas en los elementos y sus
deformaciones. La naturaleza de las deformaciones determina el tipo de fuerzas internas. La
relación entre fuerzas internas y deformaciones en las barras, cualquiera que sea el tipo de
estructura que se analice, se hará con base en los conocimientos de resistencia de materiales.](https://image.slidesharecdn.com/principioscontinuo-200323184629/85/Principios-fundamentales-3-320.jpg)

![PRINCIPIOS FUNDAMENTALES DEL ANÁLISIS ESTRUCTURAL
Teoría General de las Estructuras I
Prof. Octavio García Domínguez
9
εΤ
L
δ
F
Figura I.3.2 Deformación longitudinal y transversal debido a carga axial.
Se tendrá entonces, que la deformación unitaria en dirección de la fuerza es:
ε =
δ
L
(I.3.2)
Donde:
ε = Deformación unitaria en la dirección de la carga.
δ = Desplazamiento en dirección de la carga.
L = Longitud inicial del elemento.
Por efecto del alargamiento de la barra se producirá una deformación transversal (εT) que se calcula
con la ecuación (I.3.3) definida como:
εT = − ν ε (I.3.3)
Donde:
ν = Relación de Poisson, 0 ≤ ν ≤ 0.5
Para el estado de carga mostrado en la figura (I.3.2), el esfuerzo axial en la barra se calcula con la
ecuación (I.1.1) donde se puede ver que es directamente proporcional a la deformación longitudinal
(ver figura I.1.1). De manera análoga, se puede demostrar que para un estado triaxial de esfuerzos
se tienen las siguientes relaciones de esfuerzo – deformación:
[X X Y
E
vε σ σ σ= − +
1
( ]Z
) (I.3.4.a)
[Y Y X
E
vε σ σ σ= − +
1
( ]Z
) (I.3.4.b)
[Z Z X
E
vε σ σ σ= − +
1
( ]Y
) (I.3.4.c)](https://image.slidesharecdn.com/principioscontinuo-200323184629/85/Principios-fundamentales-5-320.jpg)
![10 PRINCIPIOS FUNDAMENTALES DEL ANÁLISIS ESTRUCTURAL
Teoría General de las Estructuras I
XY
XY
G
γ τ= (I.3.4.d)
XZ
XZ
G
γ τ= (I.3.4.e)
YZ
YZ
G
γ τ= (1.3.4.f)
Donde, G = módulo de rigidez al cortante, y se calcula como: G
E
v
=
+2 1( )
Expresando matricialmente estas expresiones, se tiene que:
1
00000
0
1
0000
00
1
000
000
1
000
1
000
1
=
⎪
⎪
⎪
⎪
⎭
⎪⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪⎪
⎪
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−−
−−
−−
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
τ
τ
τ
σ
σ
σ
γ
γ
γ
ε
ε
ε
YZ
XZ
XY
Z
Y
X
G
G
G
EE
v
E
v
E
v
EE
v
E
v
E
v
E
yz
xz
xy
z
y
x
(I.3.5)
En forma condensada:
{ } [ ]{ }Sfe = (I.3.6)
Donde :
{e} = es el vector de deformaciones.
[f] = es un operador .
{S} = es el vector de esfuerzos.
Si hacemos
[ ] [ ]fk
1−
= (I.3.7)
Podemos escribir:
{ } [ ] { }ekS = (I.3.8)
Prof. Octavio García Domínguez](https://image.slidesharecdn.com/principioscontinuo-200323184629/85/Principios-fundamentales-6-320.jpg)
![PRINCIPIOS FUNDAMENTALES DEL ANÁLISIS ESTRUCTURAL
Teoría General de las Estructuras I
Prof. Octavio García Domínguez
11
Que es la ecuación fundamental del principio de la ley de Hooke.
Se podrá estudiar más adelante que el operador [f] es equivalente a la matriz que representa las
flexibilidades en estructuras esqueletales, es decir es un arreglo que contiene los desplazamientos
debidos a fuerzas unitarias. La inversa de la matriz de flexibilidades es la matriz de rigidez [K], que
representa las fuerzas debidas a la acción de desplazamientos unitarios.
I.4 Equilibrio
Este principio se refiere las condiciones que deben tener fuerzas internas y fuerzas externas para
que se satisfagan las leyes de la estática, es decir, la relación entre fuerzas internas y externas
determinadas por ΣFX=0, ΣFY=0 y ΣFZ=0. Las fuerzas internas quedaron definidas en el estudio del
principio de la ley de Hooke.
A continuación mostramos las ecuaciones de equilibrio aplicadas al continuo (figura I.3.1):
ΣFX=0
X XY
+ + +
∂
∂
∂
∂
∂
∂
=
σ τ τ
x y z
X
0XZ
(I.3.9.a)
ΣFY=0
Y Y
+ + +
∂
∂
∂
∂
∂
∂
=
τ σ τ
x y z
YX YZ
0 (I.3.9.b)
ΣFZ=0
Z + + +
∂
∂
∂
∂
∂
∂
=
τ τ σ
x y z
ZX ZY Z
0 (I.3.9.c)
X, Y y Z son las fuerzas de cuerpo o de peso propio , en sus tres direcciones.dV
Z
Y
X
FC
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
En forma matricial se tiene:
{ }0=
yx
0
z
00
z
0
x
0
y
0
0
zy
00
x
YZ
XZ
XY
Z
Y
X
⎪
⎪
⎪
⎪
⎭
⎪⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪⎪
⎪
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
⎪⎭
⎪
⎬
⎫
⎪⎩
⎪
⎨
⎧
τ
τ
τ
σ
σ
σ
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
Z
Y
X
(I.3.10)
De manera condensada queda como:](https://image.slidesharecdn.com/principioscontinuo-200323184629/85/Principios-fundamentales-7-320.jpg)
![12 PRINCIPIOS FUNDAMENTALES DEL ANÁLISIS ESTRUCTURAL
Teoría General de las Estructuras I
{ } [ ] { } { }0=+ SAF
T
C
(I.3.11)
Las ecuaciones (I.3.9) son las ecuaciones fundamentales de equilibrio.
Una vez planteados los tres principios, el problema se resuelve sustituyendo las ecuaciones (I.2.4) y
(I.3.8) en la ecuación (I.3.11), y resulta que:
{FC}+ [A] T
[k] [A] {d} = {0} (I.3.12)
Que representan las ecuaciones de Navier. Estas son ecuaciones diferenciales de segundo grado.
La formulación desarrollada mediante la aplicación al medio continuo de los tres principios
(principio de continuidad, ley de Hooke y principio de equilibrio) establece la base de la Teoría de
la Elasticidad.
Prof. Octavio García Domínguez](https://image.slidesharecdn.com/principioscontinuo-200323184629/85/Principios-fundamentales-8-320.jpg)

Los tres principios fundamentales del análisis estructural son: 1) El principio de continuidad permite obtener las deformaciones en función de los desplazamientos. 2) La ley de Hooke establece la relación directa entre esfuerzos y deformaciones. 3) El principio de equilibrio determina la relación entre fuerzas internas y externas mediante las ecuaciones de equilibrio.
























































