Descargado 222 veces
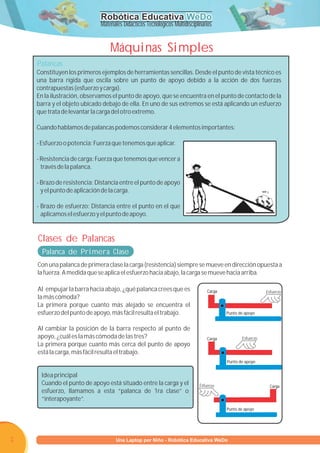



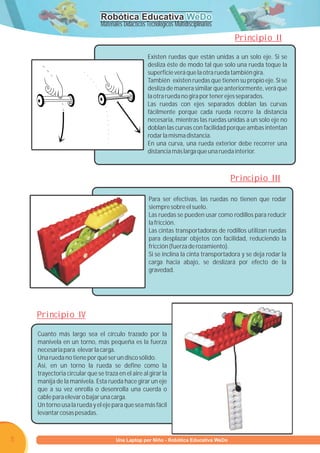
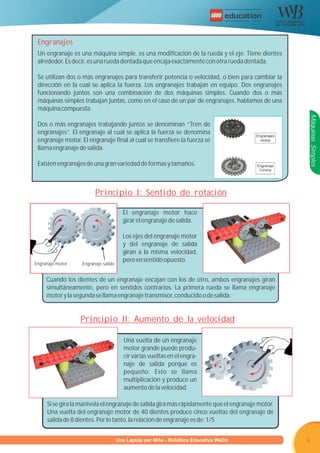

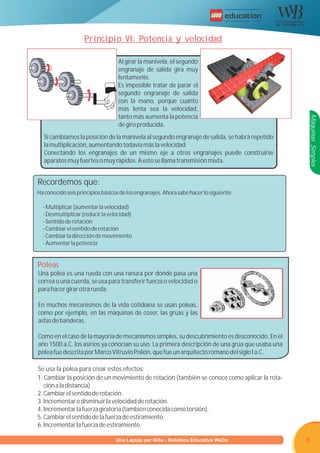



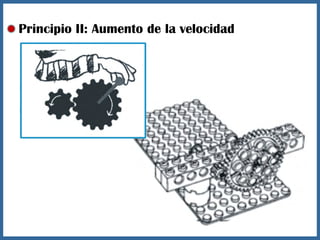
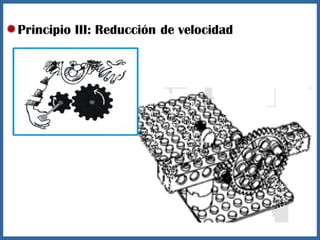
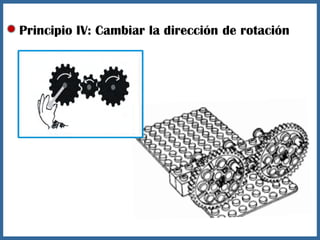
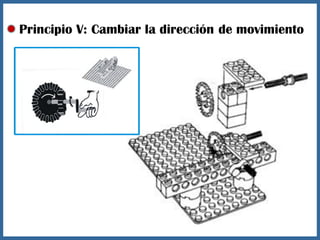
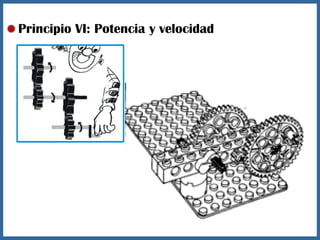


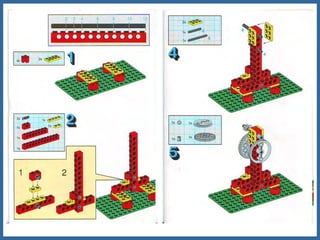
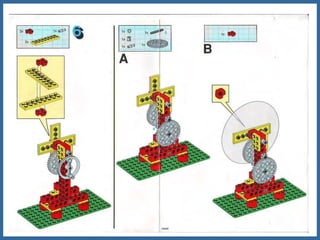
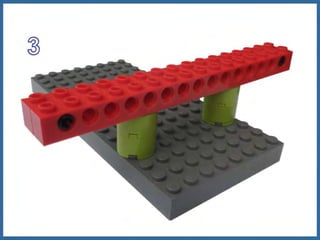



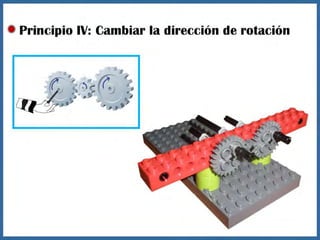
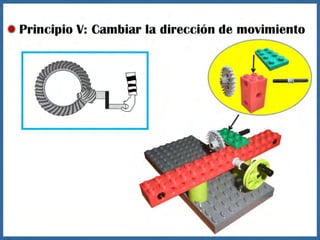


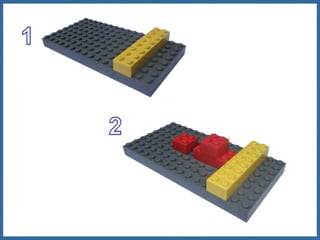




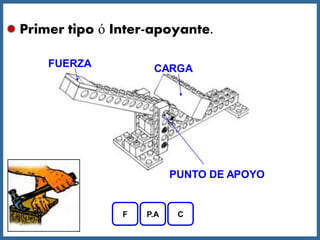
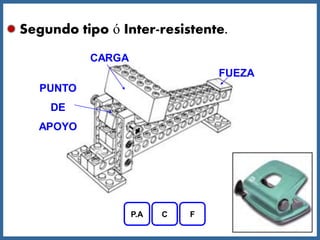
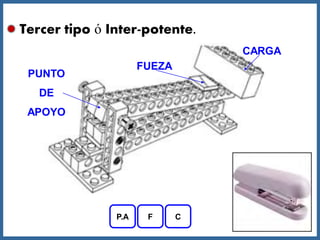

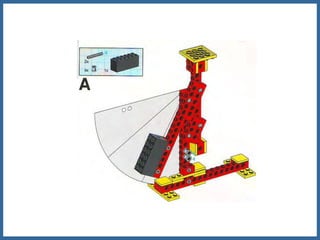












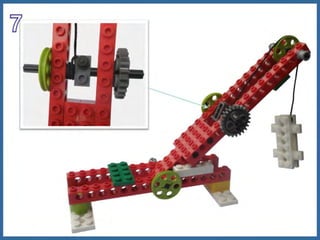
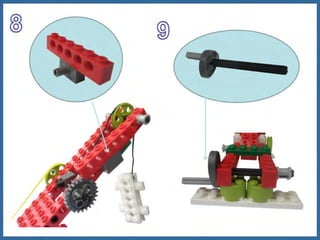

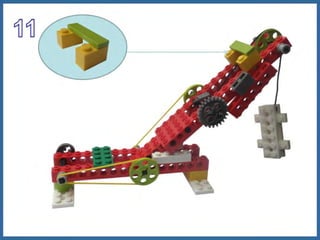





Este documento proporciona información sobre máquinas simples como palancas, ruedas y ejes, y engranajes. Explica las tres clases de palancas, los principios de cómo funcionan las ruedas y los ejes, y los seis principios de cómo funcionan los engranajes, incluido cómo pueden usarse para cambiar la velocidad, la dirección del movimiento y la potencia. El documento tiene un enfoque educativo y está destinado a ayudar a los estudiantes a comprender conceptos básicos de ingeniería mecánica.



































































