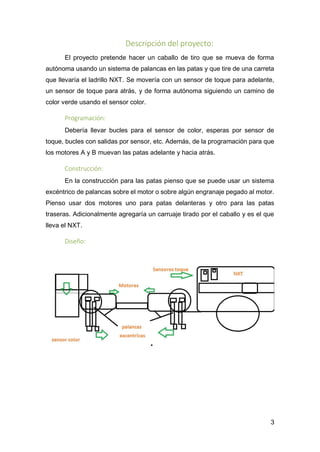
Este documento describe un proyecto para construir un caballo robot que se mueva autónomamente usando un sistema de palancas en sus patas. El caballo robot llevará un carruaje con un ladrillo NXT y seguirá un camino verde usando un sensor de color. Se propone usar dos motores, uno para las patas delanteras y otro para las traseras. El proyecto pretende explorar cómo funcionan los sistemas de palancas excéntricas y ser útil para niños de 8 a 12 años.