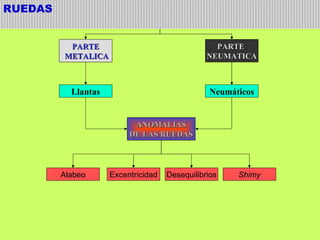
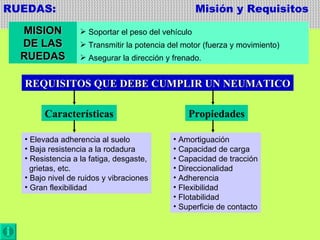
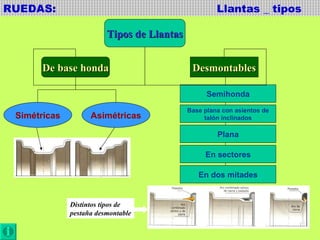
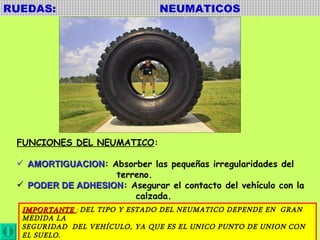
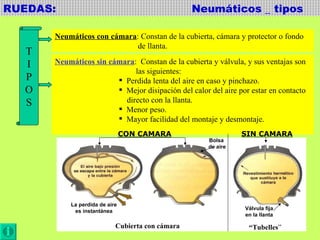
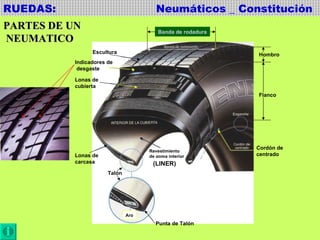
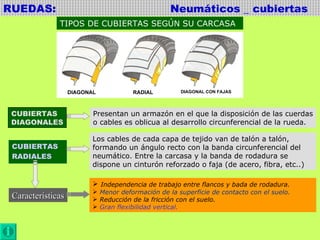
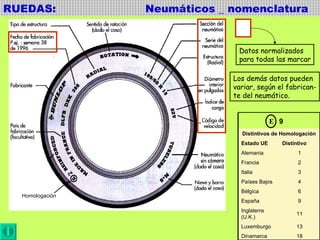
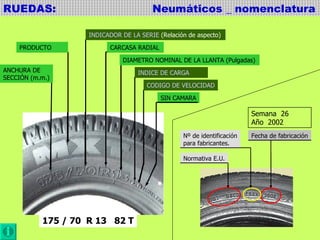
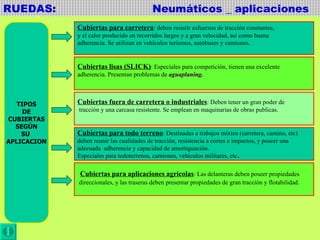
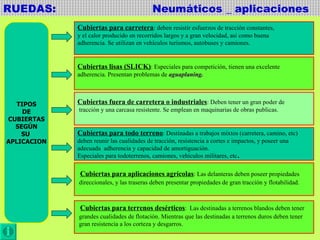
El documento proporciona información sobre ruedas y neumáticos. Explica las partes principales de una rueda como la llanta y el neumático, y describe sus funciones. También describe diferentes tipos de neumáticos según su aplicación, como neumáticos para carretera, todo terreno, competición y agrícolas. Además, explica conceptos como la nomenclatura y constitución de los neumáticos.