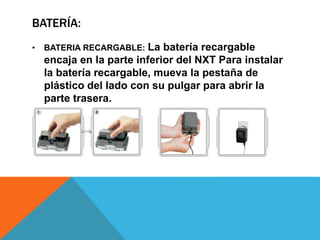
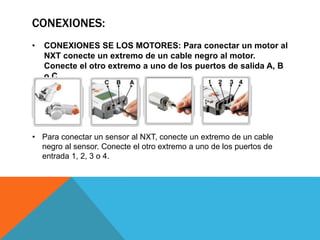
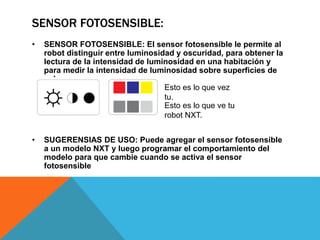
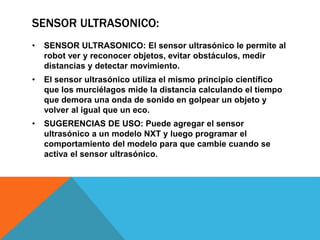
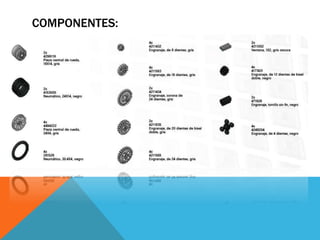
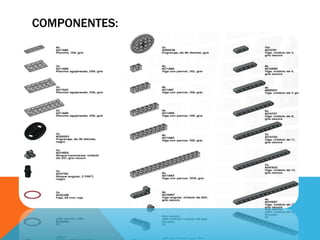
Este documento proporciona una introducción al sistema educativo de robótica LEGO Mindstorms NXT. Explica que los estudiantes pueden construir y programar su propio robot usando el ladrillo NXT y varios sensores. También describe los componentes clave del sistema como el ladrillo NXT, motores, sensores táctiles, acústicos, fotosensibles y ultrasónicos que permiten al robot interactuar con su entorno. Finalmente, brinda instrucciones sobre cómo conectar y programar los componentes para lograr el comportamiento deseado.