
![Juan Enrique García Sánchez, Octubre 2002
9
Sensores resistivos
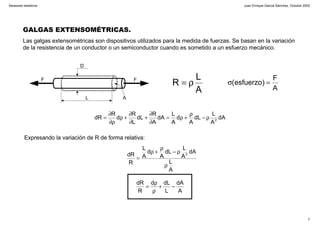
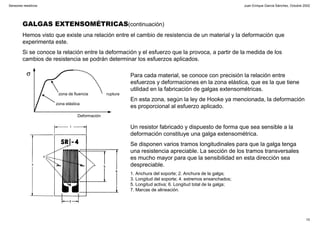
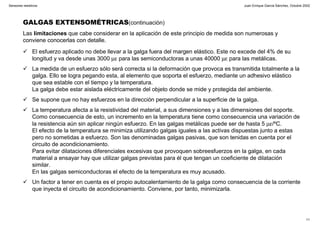
GALGAS EXTENSOMÉTRICAS(continuación)
La variación que experimenta la resistividad (ρ) de un material como resultado del esfuerzo mecánico
aplicado es lo que se conoce como efecto piezoresistivo.
Para el caso de los metales, resulta que los cambios relativos de resistividad y de volumen son
proporcionales:
V
dV
C
d
=
ρ
ρ
donde C es la denominada constante de Bridgman.
L
dL
)21(C
d
D
dD
2
L
dL
4
DL
dD
4
DL2
dL
4
D
V
dV
;dD
4
DL2
dL
4
D
dV;
4
DL
V 2
2
22
δ−=
ρ
ρ
⇒+=
π
π
+
π
=
π
+
π
=
π
=
Por tanto: ( )[ ]
L
dL
K
L
dL
21C21
R
dR
=δ−+δ+= K es el denominado factor de sensibilidad de la galga.
A la vista de la expresión anterior, ∆R=RKε y, por tanto, para pequeñas variaciones de la resistencia del hilo
deformado, esta puede expresarse:
R0 es la resistencia en reposo. El cambio de resistencia no excede, normalmente, del 2%.
En el caso de un material semiconductor, al someterlo a un esfuerzo, predomina el efecto piezorresistivo.
ε=+= Kx;)x1(RR 0](https://image.slidesharecdn.com/tema3-sensoresresistivos-161219014617/85/Tema-2-Sensores-Resistivos-9-320.jpg)


![Juan Enrique García Sánchez, Octubre 2002
26
Sensores resistivos
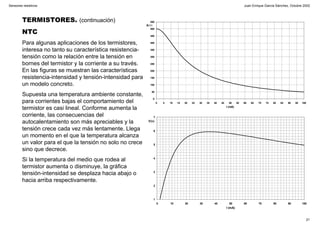
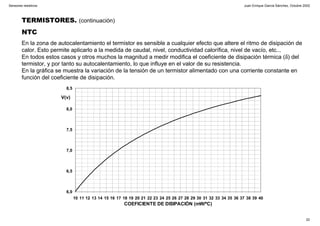
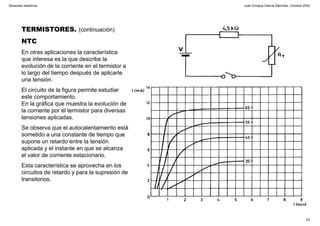
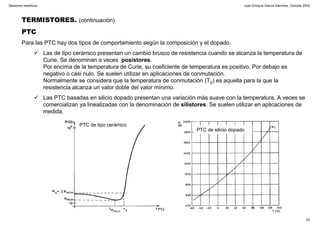
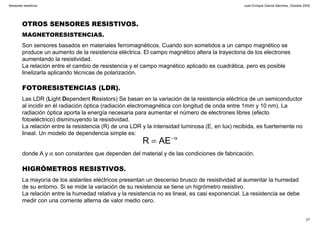
TERMISTORES. (continuación)
Características a modo de resumen.
Posibilidad de ligeros cambios de
las características con el paso del
tiempo.
Este fenómeno se minimiza en los
modelos sometidos a
envejecimiento artificial.
Intercambiabilidad sólo garantizada
para modelos especiales.
Necesidad de reajuste del circuito
en caso de sustitución.
Alta sensibilidad y alta resistividad.
Comportamiento no lineal.
Linealizable a costa de perder
sensibilidad.
Considerando varios modelos,
amplio margen de temperaturas
[-100ºC, +450ºC]
Bajo coste.
Termistores de diferentes tamaños y formas.](https://image.slidesharecdn.com/tema3-sensoresresistivos-161219014617/85/Tema-2-Sensores-Resistivos-26-320.jpg)

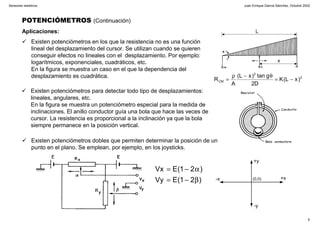
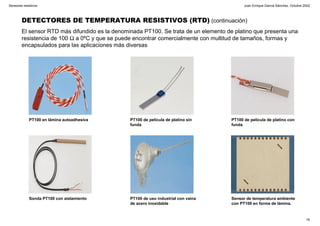
Este documento describe diferentes tipos de sensores resistivos, incluyendo potenciómetros, galgas extensométricas y detectores de temperatura resistivos (RTD). Explica el funcionamiento de cada sensor, incluyendo cómo la resistencia eléctrica varía en respuesta a cambios mecánicos, térmicos u otras magnitudes físicas. También discute aplicaciones comunes y consideraciones de diseño para cada tipo de sensor resistivo.





























































































