Superficies, Geometria Analitica
•
1 recomendación•3,163 vistas

Este documento presenta diferentes tipos de superficies geométricas tridimensionales, incluyendo superficies cónicas, cilíndricas, de revolución, cuadráticas y curvas de nivel. Explica los métodos para identificar cada superficie basado en su ecuación cartesiana y proporciona ejemplos ilustrativos de cada tipo.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Superficies, Geometria Analitica
Similar a Superficies, Geometria Analitica (20)
Último
Último (20)
Superficies, Geometria Analitica
- 4. D: parábola en el plano XZ p = ¼ V ( 1, 8, -2 ) Z Y X -4 D V o G
- 5. D PL YZ V ( 12, -5, -2 ) Z Y X 2 -4 D V o C G
- 10. D: hipérbola en el Plano YZ b = 2 X Y Z -4 4o D u 1,3,4u
- 12. f(x) = sen x + 2
- 16. Y Z X Z Y X
- 17. o Z Y X P p SUPERFICIES DE REVOLUCIÓN r z x = r cos C: y = z = r sen D: parábola en el plano YZ p = 4 416 yzr
- 18. 4-4 o Z Y X D D: hipérbola en el plano YZ b = 2
- 19. X Y Z -4 4o D D: hipérbola en el plano YZ b = 2
- 20. o Z Y X
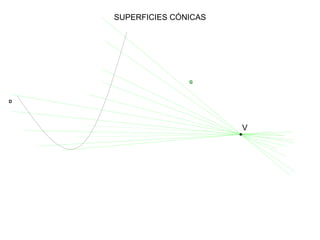
- 21. Z Y X o D G V MÉTODO DE LAS GENERATRICES SUPERFICIES CÓNICAS
- 22. X Y Z -4 4o D V(-10, -1, 8) Hipérbola en el plano YZ b = 3
- 23. D PL YZ V ( 12, -5, -2 ) Z Y X 2 -4 D V o C G
- 24. -5 Y X 2 4 Z 4 2 V V (-1, 3, 1)
- 25. u c Z Y X o MÉTODO DE LAS GENERATRICES SUPERFICIES CILÍNDRICAS
- 28. o Z Y X P MÉTODO DE LAS GENERATRICES SUPERFICIES DE REVOLUCIÓN x 2 + z 2 = 2 G: y =D: parábola en el plano YZ p = 4
- 29. ELIPSE // AL PLANO XY Gira alrededor de su eje focal 4 10 Z X Y D G 6
- 30. X Y Z -4 4 o D D Directriz: hipérbola en el plano YZ, b = 2
- 31. o Z Y X
- 32. o Z Y X C(4, 12, 8) R = 6 C
- 34. D1 ELIPSE // AL PLANO XY D2 ELIPSE // AL PLANO YZ 10 Z X Y 6 4 D1 G D2
- 36. SUPERFICIES CUÁDRICAS O CUADRÁTICAS A x 2 + B x y + C y 2 + D x z + E z 2 + F y z + G x + H y + I z + J = 0
- 37. 12 2 2 2 2 2 c lz b ky a hx 1º - Los tres signos positivos indican que se trata de un Elipsoide con centro C ( h, k, l ), si a = b ó a = c ó b = c es de revolución. 2º - Un signo negativo indica que se trata de un Hiperboloide Elíptico de un manto con centro C (h, k, l ), si a = b ó a = c ó b = c puede ser de revolución. 3º - Dos signos negativos indican que se trata de un Hiperboloide Elíptico de dos mantos con centro C ( h, k, l ), si a = b ó a = c ó b = c puede ser de revolución. 22 2 2 2 c lz b ky a hx Paraboloide Elíptico con vértice en V ( h, k, l ), si a = b es de revolución. 2 2 2 2 2 2 c lz b ky a hx Cono Elíptico con vértice en V ( h, k, l ) si a = b es de revolución. IDENTIFICACIÓN DE SUPERFICIES POR SU ECUACIÓN CARTESIANA
- 41. Curvas de nivel Superficie Mapa de contorno
- 46. 4 5 Z X Y 6 ELIPSOIDE DE REVOLUCIÓN S: 36 x2 + 36 y2 + 25 z2 - 288 x - 360 y - 300 z + 1476 = 0 2 2 2 4 5 6 1 25 25 36 x y z
- 47. 4-4 Z Y X -4 4 S: x2 + y2 – 4 z2 -16 = 0 HIPERBOLOIDE DE REVOLUCIÓN DE UN MANTO 2 2 2 1 16 16 4 x y z
- 48. o Z Y X 2 5 -3 S: 2 x2 + 2 y2 + 12 x - 20 y – 8 z + 84 = 0 PARABOLOIDE DE REVOLUCIÓN 6 2 2 3 5 4 2x y z