Este documento describe los motores paso a paso, incluyendo sus características principales, especificaciones, tipos, funcionamiento y formas de control. Explica que los motores paso a paso funcionan mediante la conmutación secuencial de sus bobinas para lograr movimiento en pasos angulares precisos, y que existen diferentes tipos como de reluctancia variable, de imán permanente y híbridos. También detalla los circuitos y componentes necesarios para controlar este tipo de motores, como drivers, controladores e indexadores.
1. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 1
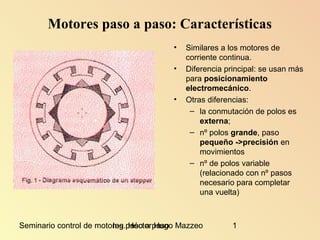
Motores paso a paso: Características
• Similares a los motores de
corriente continua.
• Diferencia principal: se usan más
para posicionamiento
electromecánico.
• Otras diferencias:
– la conmutación de polos es
externa;
– nº polos grande, paso
pequeño ->precisión en
movimientos
– nº de polos variable
(relacionado con nº pasos
necesario para completar
una vuelta)
2. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 2
Motores paso a paso: Especificaciones
• Tensión de operación
• Resistencia de los arrollamientos
• nº de pasos por revolución (o
ángulo de cada paso)
• Torque o cupla disponible
• Velocidad máxima de operación
• Otros: peso, cte. máxima/bobina,
etc.
Resolución: número de
pasos para completar una
vuelta (mayor cantidad de
pasos, mayor resolución).
3. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 3
Motores paso a paso: Funcionamiento
2 arrollamientos excitados:
posición estable, S y N, N y S
enfrentados.
1 arrollamiento excitado: posición
estable, N y S enfrentados. El
rotor giró ½ paso.
2 arrollamientos excitados:
posición estable (similar a la
inicial). El rotor giró 1 paso.
4. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 4
Motores paso a paso: Control
• Secuencia de
accionamiento 2-2 (2
arrollamientos
consecutivos siempre
activos).
• Cada fase de esta
secuencia avanza el
stepper un paso.
• Recorriendo la secuencia
inversa, gira al revés.
5. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 5
Motores paso a paso: Control
• Secuencia de accionamiento1-2 (alternativamente 1 y 2
arrollamientos energizados).
• Cada fase avanza el stepper ½ paso.
6. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 6
Motores paso a paso: Tipos de steppers
• Existen 3 tipos básicos:
– De reluctancia variable
– De imán permanente
– Híbridos
• Se diferencian por el tipo de construcción (uso o no de
imanes permanentes en el rotor y estatores de acero
laminado).
7. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 7
Motores paso a paso: Tipos de steppers
• No usa imanes
permanentes en el
rotor
• Por eso, se mueve
libremente al girarlo
• Uso: aplicaciones no
industriales que
requieren poco
torque
Motor de reluctancia variable
Motor de 15 grados por paso
8. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 8
Motores paso a paso: Tipos de steppers
• Usualmente tienen 3 (a veces 4) bobinados, con un retorno
común.
• El stepper de la figura tiene 4 “dientes” en el rotor y 6 polos en
el estator.
Motor de reluctancia variable
9. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 9
Motores paso a paso: Tipos de steppers
• El rotor está compuesto por
varios polos (imanes
permanentes).
• El rotor no tiene “dientes”
• Tienen baja velocidad y
bajo torque.
• Bajo costo.
• Ideales para aplicaciones no
industriales (por ej. impre-
soras, scanners, disketeras).
Motor de imán permanente
Motor de 90º por paso con 4 fases (A-D)
10. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 10
Motores paso a paso: Tipos de steppers
• Combina las mejores
características de los
anteriores.
• Tienen muchos polos en el
rotor (p.ej. 200).
• Tienen altas resoluciones
(hasta < 1º).
• Tienen gran torque.
• Son más caros.
• Ideales para aplicaciones
industriales (p.ej. robots).
Motor híbrido
11. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 11
Motores paso a paso: Tipos de steppers
• Tienen 5 o 6
terminales, con una
derivación en el
centro de cada
bobina.
• Los puntos
medios(1 y 2) se
conectan a c.c. y
los terminales (a y
b) a masa
alternativamente.
Motores unipolares
• El rotor de la figura es un magneto de 6 polos.
• Cada arrollamiento o bobina está distribuido
entre 2 polos en el estator.
12. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 12
Motores paso a paso: Conexión de las bobinas
13. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 13
Motores paso a paso: Tipos de steppers
• Similares a unipolares
pero sin derivación
central en las bobinas.
• Es más simple que
unipolares, pero el
driver es más
complejo.
• Requiere un “puente
H” para alimentar cada
bobina con ambas
polaridades.
Motores bipolares
14. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 14
Motores paso a paso: Control de steppers
Una unidad de control (no representada) provee las señales
necesarias para abrir y cerrar las llaves con la secuencia
apropiada para posicionar el motor o hacerlo girar. Puede ser
una computadora con soft adecuado.
Circuito de control para un
stepper de reluctancia variable
• Se requiere una llave por
cada bobina (transistor).
• Como las cargas son
inductivas, hay que agregar
diodos de “damping” en
paralelo para proteger los
transistores.
15. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 15
Motores paso a paso: Control de steppers
Como en el caso anterior, cada
cuadro representa una llave
electrónica.
Circuito de control para
steppers unipolares e híbridos
Como la corriente circula en 2
sentidos por cada semibobina,
se requieren 2 diodos por cada
una.
16. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 16
Motores paso a paso: Control de steppers
Circuito de control para
steppers bipolares: puente H
En este tipo de circuitos hay que
ser cuidadoso con el control para
no cortocircuitar la fuente! (p.ej.
al cerrar A y B simultáneamente).
Para evitar cortocircuitar la fuente:
17. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 17
Motores paso a paso: Circuitos de drivers prácticos
•Cada llave es compatible con una
entrada TTL.
•Los 5 V para la lógica, incluyendo la
del driver open collector 7407 debe
estar bien regulada.
•El SK3180 es un Darlington con
ganancia de corriente = 1000.
•El IRL540 puede manejar hasta 20 A,
soportando tensiones inversas de
hasta 100 V.
Para motores unipolares y de
reluctancia variable.
El ULN2003, circuito comercial con 7 transistores
Darlington con entradas compatibles con TTL,
c/u protegido con 2 diodos ( protegen contra
tensiones inversas y picos inductivos).
18. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 18
Drivers para el control: el ULN2003
• Corriente máxima: 500 mA (sólo se muestran 4 de los 7 transistores).
• Incluye los diodos de “damping” para proteger al transistor de la cte.
inversa cuando se desconecta la carga inductiva
19. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 19
Motores paso a paso: Circuitos de drivers prácticos
Para motores bipolares y puentes H
• Las entradas X e Y pueden
controlarse con drivers TTL
open collector.
• Conocidos como puente H.
• Para energizar la bobina, sólo
con X alto e Y bajo o viceversa.
Para cargas y tensiones pequeñas puede
usarse un tri-state TTL tipo LS244 como
semipuente.
20. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 20
Motores paso a paso:
Circuitos de drivers comerciales
Circuito “puente H” comercial
• El L293 contiene 2 puentes
H (puente H dual).
• La versión L293D es igual
pero incluye los diodos de
protección.
• Permiten manejar steppers
bipolares de hasta 1 A por
bobina y 36 V.
21. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 21
Motores paso a paso:
Circuitos de drivers comerciales: L298
Para cargas mayores (hasta 2 A) puede
usarse el L298, también puente H dual.
22. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 22
Motores paso a paso:
Circuitos de drivers comerciales: L298
Para corrientes mayores (4 A)
pueden conectarse ambos
puentes en paralelo:
23. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 23
Motores paso a paso: Drivers
• El driver recibe los pulsos de bajo nivel desde el sistema de
control (indexer), generando los pasos para mover el motor.
• La velocidad y torque depende del flujo de corriente a las
bobinas, que está limitada por la inductancia.
• Para reducir este efecto, muchos drivers trabajan con mayores
tensiones que las del motor.
24. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 24
Motores paso a paso: Indexer o controlador
• Provee la cantidad de pasos y dirección de giro al driver.
• A veces incluye otros parámetros como aceleración,
desaceleración, pasos por segundo.
• Los basados en microprocesador pueden funcionar stand-alone
o controlados por una computadora vía RS232. En nuestro
ejemplo se hace por el pto. paralelo.
25. Seminario control de motores paso a pasoIng. Héctor Hugo Mazzeo 25
Motores paso a paso: Circuito controlador + driver
Mediante
el L297 se
generan
las
señales
necesarias
(paso o
semipaso,
cantidad
de pasos,
dirección,
etc.).