
Recomendados
Recomendados
Más contenido relacionado
Similar a Proyecto de robotica industrial
Similar a Proyecto de robotica industrial (20)
Último
Último (20)
Proyecto de robotica industrial
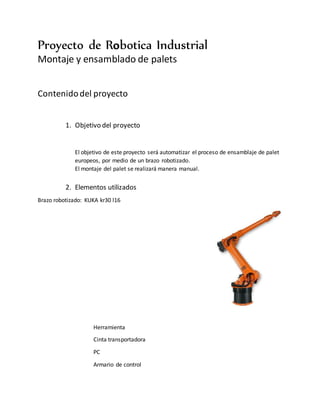
- 1. Proyecto de Robotica Industrial Montaje y ensamblado de palets Contenidodel proyecto 1. Objetivo del proyecto El objetivo de este proyecto será automatizar el proceso de ensamblaje de palet europeos, por medio de un brazo robotizado. El montaje del palet se realizará manera manual. 2. Elementos utilizados Brazo robotizado: KUKA kr30 l16 Herramienta Cinta transportadora PC Armario de control
- 2. Programadora Eje Externo: dpk400 3. Sistemas de seguridad Seta de emergencia Alfombra de presión Cortina de seguridad Cerradura de seguridad 4. Descripción de funcionamiento
- 3. El proceso es iniciado por un operario, el cual dispone las piezas del palet europeo en una matriz; dicha matriz es simétrica y a su vez de colocará encima de una mesa giratoria. Una vez las piezas están colocadas de manera correcta, eloperario activará un pulsador que girará la mesa situando la matriz cargada accesible para el robot. Acto seguido el brazo robótico, equipado con una herramienta para dicho propósito, se encargará de clavar las piezas del palet. Una vez esté listo, retirará el palet de la matriz y lo dispondrá encima de una cinta transportadora que retira el palet de la celda. 5. Simulación del proceso 6. Archivos descargables