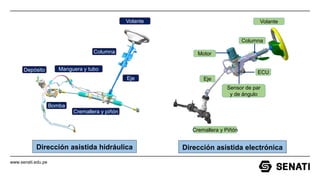
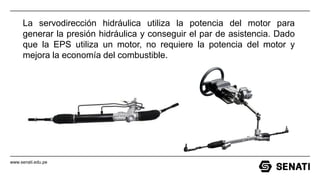
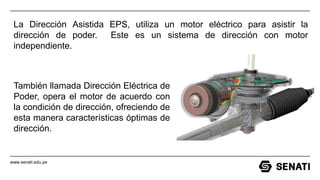
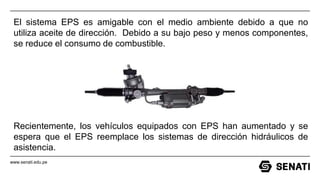
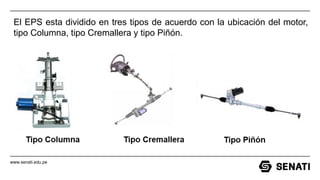
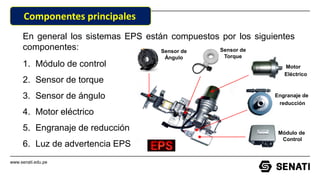
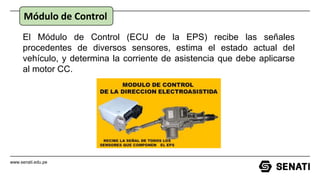
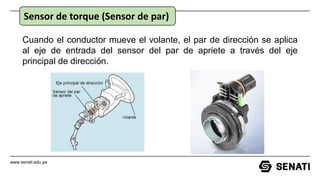
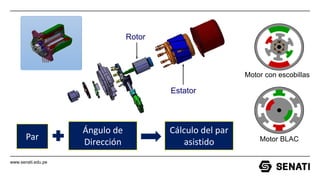
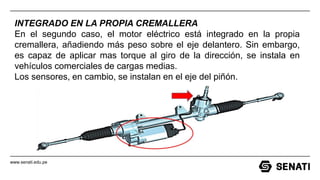
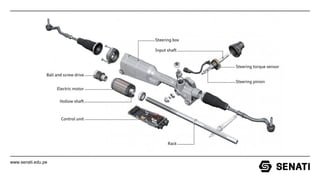
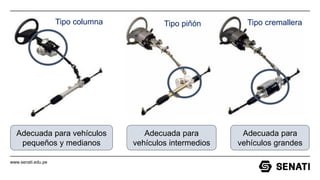
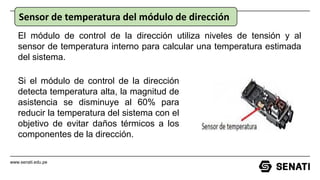
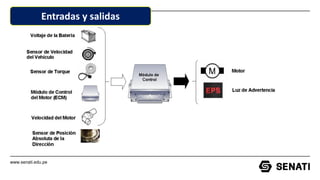
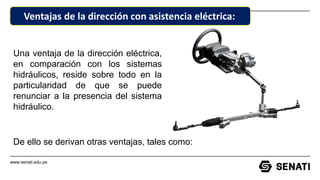
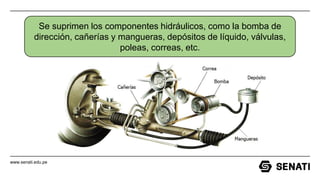
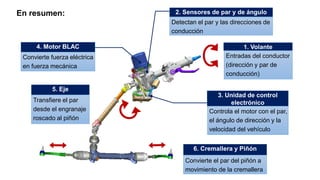
Este documento describe el sistema de dirección asistida eléctrica (EPS) en vehículos. El EPS utiliza un sensor de par, un sensor de ángulo y un motor eléctrico para asistir la dirección mediante la detección de la fuerza aplicada al volante y la posición de este. El sistema ofrece una dirección más suave y eficiente energéticamente en comparación con los sistemas hidráulicos tradicionales.