Este documento presenta los conceptos básicos de vectores y cálculo vectorial, incluyendo definiciones de vectores, operaciones con vectores, sistemas de coordenadas, derivación e integración vectorial, y operadores vectoriales como gradiente, divergencia y rotacional.

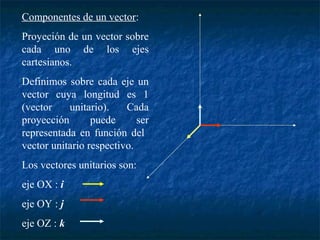
![Producto vectorial:
Se define como producto
vectorial de los vectores A y
B al vector V tal que
V = A ´ B = [A B]
es perpendicular a A y B a
la vez y cuya magnitud se
define como:
| V | = | A |.| B | senq
Puede verse que la
magnitud del vector V es
igual al área definida por A
y B.
Observe el sentido de la
rotación.
B
A
V
q](https://image.slidesharecdn.com/calcvector-141024203410-conversion-gate02/85/Calc-vector-15-320.jpg)
![Propiedades:
A + B = B + A
A - B = - (B - A)
c(A + B) = cA + cB
A.B = B.A
A.(B + C) = A.B + A.C
A.(B + C) = (B + C).A
A.A = | A |2
[A B] = - [B A]
[A (B + C)] = [A B] + [A C]
A.[C B] = B.[A C] = C.[B A]
[A [B C]] = (A.C)B - (A.B)C
TTaarreeaa:: DDeemmoossttrraarr llaass
aanntteerriioorreess rreellaacciioonneess](https://image.slidesharecdn.com/calcvector-141024203410-conversion-gate02/85/Calc-vector-16-320.jpg)
![Existe el llamado triple escalar :
[ ]
ABC A .
B C
A A A
1 2 3
B B B
1 2 3
C C C
1 2 3
=
= ´ =](https://image.slidesharecdn.com/calcvector-141024203410-conversion-gate02/85/Calc-vector-18-320.jpg)