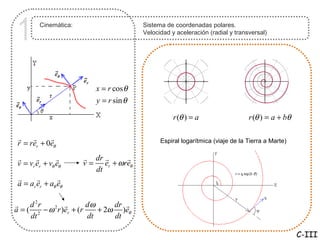
El documento describe los conceptos de cinemática en coordenadas polares, incluyendo velocidad, aceleración radial y transversal. Explica que la aceleración cuantifica la variación de la velocidad en la dirección radial o angular, y que la aceleración de Coriolis ocurre cuando hay variación en la velocidad angular. Finalmente, analiza casos particulares como movimiento circular uniforme, donde la aceleración tangencial es cero y la normal es la aceleración centrípeta.