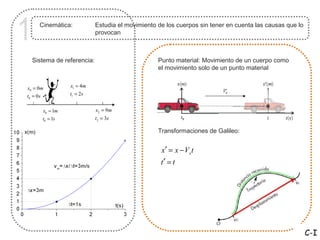
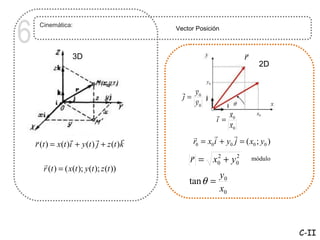
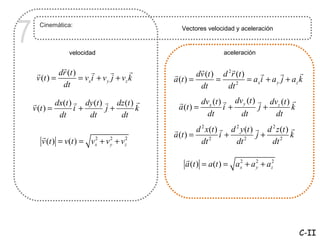
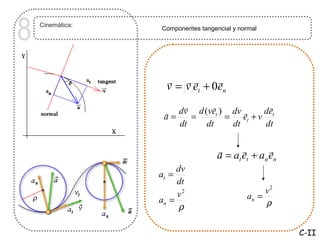
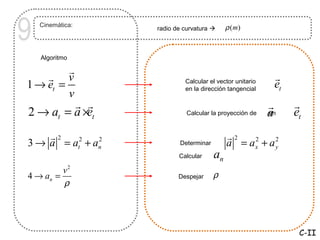
Este documento trata sobre cinemática, que estudia el movimiento de los cuerpos sin considerar las causas. Describe conceptos como sistema de referencia, posición, velocidad, aceleración, vectores y componentes tangenciales y normales. Explica cómo calcular la velocidad, aceleración y radio de curvatura usando derivadas, integrales y álgebra vectorial.
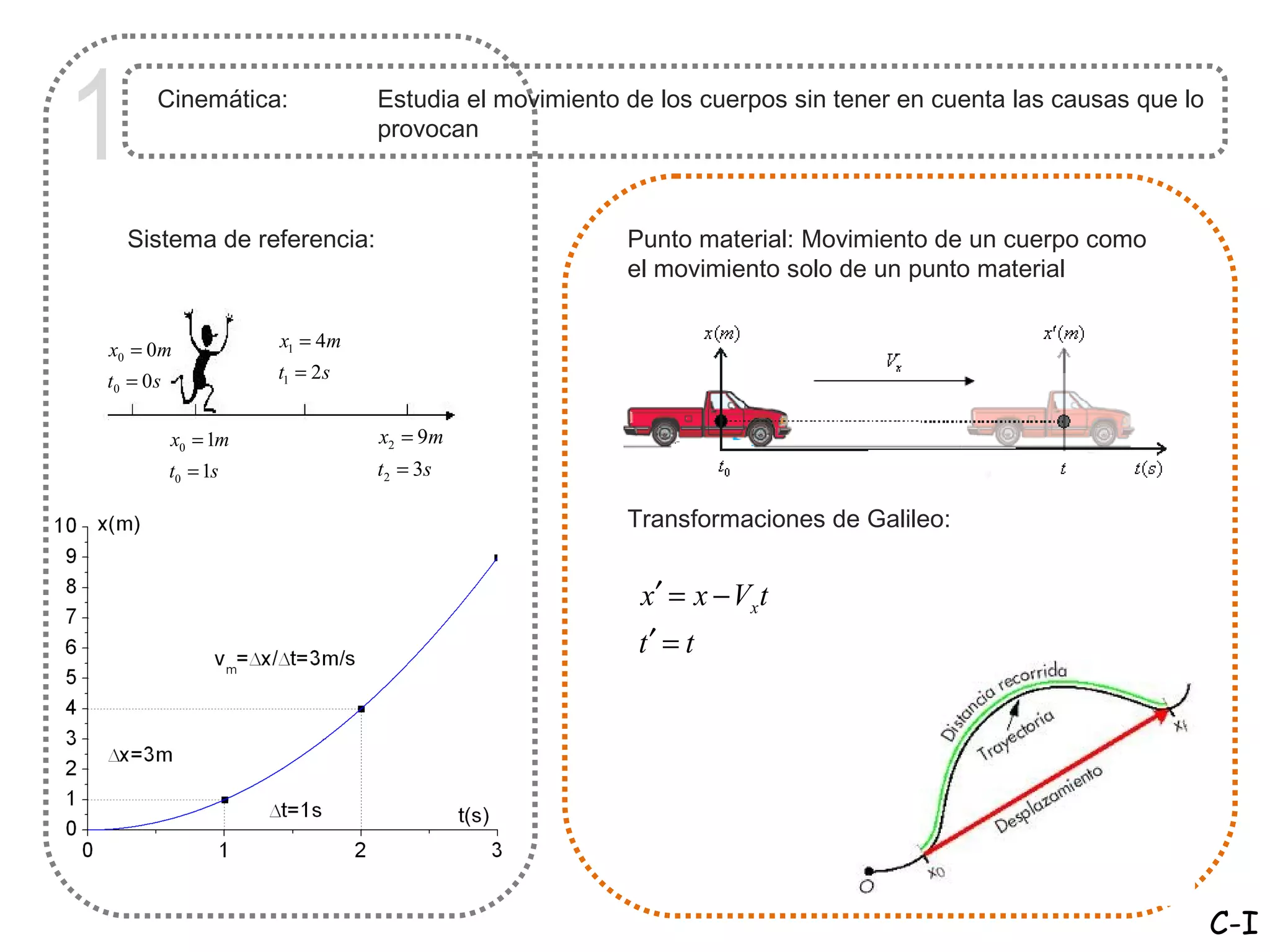
![3 Cinemática: Velocidad constante, aceleración constante y variable
Aceleración variable
t
x(t ) = x0 + ∫ v(t )dt
t0
t Unidades
v(t ) = v0 + ∫ a (t )dt
t0 x[m] v[m / s] a[m / s 2 ]
C-I](https://image.slidesharecdn.com/claseintromeccinem1y2-130408110011-phpapp02/85/Clase-intro-mec_cinem_1_y_2-3-320.jpg)
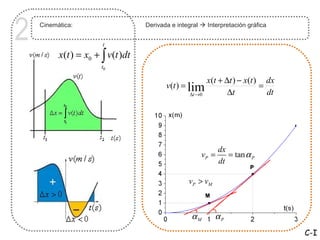
![4 Cinemática: Cinemática en 3D. Vectores posición, velocidad y
aceleración.
Cinemática en 1D. Cinemática en 3D.
r r 2r
dx dv d x 2
r dr r dv d r
v= a= = 2 v= a= = 2
dt dt dt dt dt dt
t t
r r r
x(t ) = x0 + ∫ v(t )dt r (t ) = r0 + ∫ v (t )dt
t0 t0
t t
r r r
v(t ) = v0 + ∫ a (t )dt v (t ) = v0 + ∫ a (t )dt
t0 t0
Unidades
r r r
r [m] v [m / s ] a[m / s 2 ]
C-II](https://image.slidesharecdn.com/claseintromeccinem1y2-130408110011-phpapp02/85/Clase-intro-mec_cinem_1_y_2-4-320.jpg)

















![Transformada de laplace_1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/transformadadelaplace11-110907232804-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)























































