Este documento presenta información general sobre técnicas topográficas modernas. Explica conceptos clave como la planimetría, altimetría y topografía integral. También describe brevemente la historia de la topografía y los instrumentos topográficos importantes como el teodolito y la estación total. Finalmente, destaca la importancia de los puntos de control en la topografía para determinar la posición de otros puntos.


















































































![Teoría de observaciones
35
Dado que n = 100 > 30
2
V 930,14
=
n 100
Σ
σ ± = ± ⇒ σ = ±3,05 mm
Este valor significa que de las 100 mediciones tomadas es probable que 68 de ellas queden
dentro de los límites de error [–3,05 mm; +3,05 mm].
Veamos la tabla, para un intervalo de error [–3,50 mm; +3,50 mm], tenemos 76 mediciones
que caen dentro de dicho rango (analice Ud. en el intervalo [–3,05 mm; +3,05 mm]).
Intervalo del histograma Frecuencia absoluta
(mm)
–8,5 a –7,5 1
–7,5 a –6,5 1
–6,5 a –5,5 2
–5,5 a –4,5 3
–4,5 a –3,5 5
–3,5 a –2,5 8
–2,5 a –1,5 11
–1,5 a –0,5 12
–0,5 a +0,5 14
–0,5 a +1,5 12
+1,5 a +2,5 11
+2,5 a +3,5 8
+3,5 a +4,5 5
+4,5 a +5,5 3
+5,5 a +6,5 2
+6,5 a +7,5 1
+7,5 a +8,5 1
76 mediciones
D) Error probable de una observación (E50)
Es aquel intervalo, dentro de cuyos límites exis-
te la probabilidad de que el 50% del total de
mediciones integren dicho rango.
En la actualidad se usa poco este error.
± σ
50
E = 0, 6745
σ : Desviación típica o estándar
En el ejemplo ilustrativo:
± σ ±
50
E = 0,6745 = 0,6745( 3, 05)
±
50
E = 2, 06 mm
Este valor significa que de las 100 mediciones tomadas, es probable que 50 de ellas queden
dentro de los límites de error [–2,06 mm; +2,06 mm].](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-88-320.jpg)
![Teoría de observaciones
36
E) Ecuación general del índice de precisión
La probabilidad de un error de cualquier porcentaje de probabilidad se determina por la siguien-
te expresión:
= σ
p
E K
Ep : Porcentaje de error
K : Factor numérico que corresponde al porcentaje de error
σ : Desviación típica o estándar
Expresiones usuales en topografía: E90 = 1.6449 σ
E95 = 1.9599 σ
E99,73 = 3 σ
Comúnmente en topografía se usa con mayor frecuencia: E95, en nuestro ejemplo ilustrativo:
E95 = 1,9599 (±3,05)
E95 = ± 5,98 mm
Este valor significa que de las 100 mediciones tomadas es probable que 95 de ellas queden
dentro de los límites de error [–5,98 mm; +5,98 mm].
Por otro lado es preciso anotar que la curva de probabilidad en el eje de las X es una asíntota, luego;
no se puede evaluar el error de 100%, razón por la cual debe considerarse que estas tres expresio-
nes (E90; E95; E99,73) nos dan los valores máximos que se presentan en la práctica. Errores mayores
que ±3σ ya no se consideran errores accidentales sino equivocaciones.
F) Error de la media (Em)
Está visto que la media, también está sujeto a error.
Error de la media a cualquier porcentaje de probabilidad es aquel intervalo (–Em; +Em) dentro de
cuyos límites puede caer el verdadero error accidental de la media con una probabilidad de p%.
Ep
Em
n
=
=
+ + + +
1 2 3 n
x x x ... x
X
n
Si hacemos: E = Ep
2 2
E nE
suma p
=
E n E
suma p
= ...(2)
(2) en (1): =
p
m
E
E
n
...demostrado
Demostración:
Luego:
Esuma
Em
n
= ...(1)
Pero: 2 2
E E
suma = Σ](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-89-320.jpg)
![Teoría de observaciones
37
En el ejemplo ilustrativo (si p = 95%)
E
95
= ±5,98 mm
= ⇒ = ±
95
m m
E
E E 0,60 mm
100
G) Valor más probable (V.M.P.)
Es aquel valor que se acerca más al verdadero valor pero que no lo es. Comúnmente se
considera a la media como el valor más probable de varias mediciones.
V.M.P. = X
En el ejemplo ilustrativo: V.M.P. = 700,00 mm; como quiera que el V.M.P. nunca será el
valor verdadero, se deduce que existirá un error y que dicho valor exacto estará ubicado
dentro del rango de ciertos limites: [V.M.P. –Em; V.M.P. +Em] con una probabilidad de
p%. En el ejemplo ilustrativo, el valor verdadero estará contenido en el rango de [700 –
0,60 ; 700 + 0,60], lo que es [–699,40 mm ; 700,60 mm] con una probabilidad del 95%.
PROBLEMAS DE APLICACIÓN
1. Se midió una base cinco veces, obteniéndose:
115,334 m; 115,326 m; 115,315 m; 115,336 m;
115,335 m. Calcular el error probable de una
observación con el 95% de probabilidad de
que sea cierto.
Solución
Número Valor (m) Vi Vi
2
1 115,334 0,005 2,5×10-5
2 115,326 -0,003 0,9×10-5
3 115,315 -0,014 19,6×10-5
4 115,336 0,007 4,9×10-5
5 115,335 0,006 3,6×10-5
X = 115,329 ΣVi
2
= 31,5×10
-5
Σ ×
± = ±
×
σ
σ
2 -5
i
-3
V 31,5 10
=
4
= 8,874 10 m
n – 1
El error probable de una observación con el
95% de probabilidad de que sea cierto es:
E95= 1,9599σ = 1,9599(±8,874×10
-3
)
E95= ±0,017 m
Nótese que ningún valor referente a V so-
brepasa el correspondiente a 3σ = 0,027, con
el cual no hay motivo de depuración.
2. Se ha efectuado la medición de una distan-
cia y los resultados obtenidos son:
1° Medición: 800, 213 m
2° Medición: 800,220 m
3° Medición: 800,603 m
4° Medición: 800,218 m
Se pide calcular el verdadero valor con una
probabilidad del 50%](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-90-320.jpg)

![Teoría de observaciones
39
2 -5
i
V 12, 4 10
=
= 0, 0042
n – 1 7
Σ ×
± = ±
±
σ
σ
Vmax = 3σ = ±0,013
La varianza de ninguna medición sobrepasa
el máximo, por lo cual no hay motivo de de-
puración de valores:
E50 = 0,6745σ = ±0,003 m
El verdadero valor con el 50% de probabili-
dad está dentro del siguiente intervalo:
L = L ± E50
L = 2,255 ± 0,003 = [2,252; 2,258] m
El valor 2,260 no está dentro del intervalo
correspondiente al 50% de probabilidad.
4. Se llevó a cabo una nivelaciónentre los puntos
A, B y C. Realizados por los grupos 1, 2 y 3
obteniéndoselossiguientesdatos,(enmetros).
Grupo 01
Pto V(atrás) V(adelante) Cota D(m)
A 0,251 100,00
1 1,424 2,423 50,00
B 0,923 1,212 40,10
2 1,726 0,632 48,30
A 0,08 31,80
Pto V(atrás) V(adelante) Cota D(m)
B 1,22
1 2,42 1,22 35,10
2 1,824 0,472 44,20
C 0,223 0,414 50,70
3 0,523 1,425 34,60
4 1,032 2,453 48,90
B 1,248 46,50
Grupo02
Pto V(atrás) V(adelante) Cota D(m)
A 0,257
1 0,832 1,070 20,00
2 1,253 1,724 30,00
3 2,426 1,232 40,00
4 2,102 0,342 40,00
5 1,834 0,723 35,00
C 0,264 2,200 20,00
6 0,102 2,432 30,00
7 1,234 1,263 45,00
8 2,620 1,264 70,00
A 0,660 30,00
Grupo03
• Las cotas de B y C son:
Cota B = 98,051 ; Cota C = 101,400
Dicho grupo también midió el ángulo ver-
tical que forma el horizonte con la línea
recta que une B y C.
Obteniéndose: θ = 01° 30' 20"
θ = 01° 30' 45"
θ = 01° 30' 40"
Se pide: El valor más probable de la dis-
tancia topográfica.](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-92-320.jpg)



![Teoría de observaciones
43
B) Error probable de la media (Em)
Es aquel intervalo [–Em ; +Em], dentro de cuyos límites puede caer el verdadero error
accidental de la media con una probabilidad de p%.
2
m
(PV )
E K
( P)(n – 1)
Σ
= ±
Σ
Em : Error de la media para p%
K : Factor número que corresponde al porcentaje de error
P : Peso
V : Desviación
n : Número de observaciones
Obteniendo: p = 50% ⇒ K = 0,6745
p = 90% ⇒ K = 1,6449
p = 95% ⇒ K = 1,9599
C) Valor más probable (V.M.P.)
Comúnmente se considera a la media como el valor más probable.
V.M.P. = X
Errores en las operaciones matemáticas
Hasta el momento se han analizado los errores accidentales para una operación simple.
Sin embargo existen ocasiones en las cuales es necesario realizar una operación compuesta; así
por ejemplo, supongamos que se desea medir la distancia que hay entre dos puntos del orden de
100 metros, con una cinta métrica de 20 metros; en este caso el valor final vendrá afectado de un
error que será la resultante de los errores de las mediciones elementales.
A) Error de una suma
L = L1 + L2 + L3
= ± + +
2 2 2
suma 1 2 3
E E E E](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-96-320.jpg)



![Teoría de observaciones
47
El verdadero valor se encuentra en el si-
guiente intervalo:
X : (164,309 ± 0,006) m
6. Determinar el verdadero valor de la superfi-
cie del sector circular medido, sabiendo que
el radio es de 120,80 m ± 0,05 m; el ángulo
observado es 11° 15' ± 05'.
Sugerencia: 1 minuto = 0,0003 rad.
Solución
r = 120,80 m ± 0,05 m
θ = 11° 15' ± 05'
A = ?
A =
1
2
br
A =
1
2
(θ×r)r
A =
1
2
θ×r
2
=
360
π
θ×r
2
• Calculandoelvalormásprobabledelasuperficie:
π 2
A = (11° 15')(120,80)
360
A = 1432,63 m2
• Calculando el error probable:
2 2
r
A A
r
E E E
θ
θ
∂ ∂
= × + ×
∂ ∂
θ
θ⋅ θ⋅
θ
∂ π ∂ π
= × + ×
∂ ∂
H
2 2
2 2
r r
r
E E E
360 360
[ ]
2 2
2
r
E E 2r E
360
θ θ×
π
= × + × ×
H
[ ]
×
π
= × + × × ×
2 2
2
120,8 120,8
E (5 0,0003) 11°15' 2 0,05
360
E = 1,20 m
2
• El verdadero valor estará comprendido en
el siguiente rango:
A = 1 432,63 m2
± 1,20 m2
7. Se ha medido una distancia inclinada entre dos
puntos dando una longitud de 400 m, habién-
dose usado una cinta de 25 m con un error por
cintada de ±0,01 m y el ángulo vertical con res-
pecto al horizonte igual a 7° 15' ± 03'. Hallar el
verdadero valor de la distancia horizontal.
Solución
• Analizando la longitud de media.
L
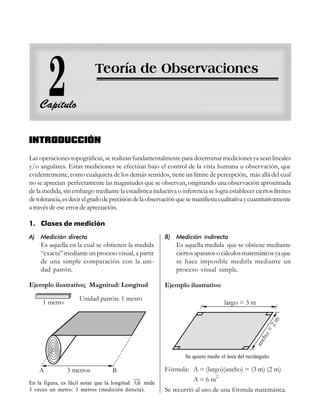
Total
= 8(25) = 400 m
2 2 2
8 veces
Error probable (0,01) (0,01) ... +(0,01)
= + +
!
2
Error probable 8(0, 01) 0, 028 m
= =
L : 400 m ± 0,028 m
• Analizando el triángulo rectángulo generado:
L = 400 m ±
}
EL
0, 028
θ = 7° 15' ± {
E
3'
θ
D =L cos θ
D = 400 cos 7° 15' ⇒ D = 396,802 m
Calculando el error probable:
2 2
L
D D
L
E E Eθ
θ
∂ ∂
= × + ×
∂ ∂
[ ]
2 2
L
cos –sen
E E L Eθ
θ θ
= × + × ×
[ ]
π
= × + × ×
2
2
cos –sen
E 7°15' 0,028 7°15' 400 0°3'
180°
E = ±0,052 m](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-100-320.jpg)

![Teoría de observaciones
49
PL 81,181
L
P 5
Σ
= =
Σ
= =
L 16,236 m; n 3
• Calculando: Em para 90% de probabilidad
2
m
(PV )
E 1, 6449
( P)(n – 1)
Σ
= ±
Σ
–6
m
34,8 ×10
E 1, 6449 0, 003 m
5(3 – 1)
= ± = ±
BC = 16,236 m ± 0,003 m
• Analizando la longitud AC
AC = AB + BC = 20,250 + 16,236
AC = 36,486 m
• Calculando el error de la media con una probabilidad del 90%.
= ± + = ± +
2 2 2 2
suma 1 2
E E E (0,004) (0,003)
suma
E 0, 005 m
= ±
El verdadero valor de la longitud AC con una probabilidad del 90% se encontrará en el
siguiente rango:
[36,486 m ± 0,005 m] = [36,481; 36,491] m
Li Pi PL V V2
PV2
16,233 2 32,466 –3,2×10
–3
10,24×10
–6
20,48×10
–6
16,238 2 32,476 +1,8×10–3
3,24×10–6
6,48×10–6
16,239 1 16,239 +2,8×10
–3
7,84×10
–6
7,84×10
–6
Σ 5 81,189 +0,002 4×10–6
34,8×10–6](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-102-320.jpg)





































![El teodolito
174
Se gira la alidada en sentido horario hasta ubicar con la
visual el punto B. La lectura del índice R1
es 180° 01'
2. Visando el punto C.
Se gira la alidada en sentido horario hasta ubicar con la
visual el punto C. La lectura del índice R1
es 206° 31'.
Visando el punto “C” con anteojo directo; el índice R1
marca 26° 32'
Se invierte el anteojo, mientras tanto la lectura del índi-
ce R
1
no ha cambiado
Ejemplo 2
Utilizando un teodolito cenital se mide el ángu-
lo vertical para el punto P; obteniéndose el si-
guiente dato de campo; calcular la lectura final.
• Ángulo final = [42° 27' + (360° – 317° 31')]/ 2
Ángulo final = 42° 28'
Explicación esquemática del trabajo de campo
1. Visando el punto “P” con anteojo directo.
Visando el punto “P” con anteojo directo; el índice S1
marca 42° 27'
Lectura = 180° 01'
Punto Lectura Vertical
Visado Anteojo directo (A.D.) Anteojo invertido (A.I.)
P 42° 27' 317° 31'
Lectura = 42° 27'
Lectura = 26° 32'
Lectura = 26° 32'
Lectura = 206° 31'](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-140-320.jpg)


































































































































































































































































































![Ajustes en los circuitos topográficos aplicando el método de mínimos cuadrados
405
• Planimétricamente:
Considerando:
A = (100,000 ; 100,000) m
6. Tres puntos de control colineales X, Y, Z
tienen las siguientes coordenadas:
Lado d (m) ∆x = dsen Z ∆y = dcos Z
AB 33°19'16,42
A1 41°16'56,42 90,998 60,038 68,382
A2 43°04'16,42 93,999 64,193 68,667
A3 79°37'36,42 12,999 12,787 2,341
A4 114°20'36,4 13,998 12,753 –5,770
Punto E = 100 + ∆x N = 100 + ∆y Cota(m)
1 160,038 168,382 107,851
2 164,193 168,667 107,865
3 112,787 102,341 108,272
4 112,753 94,230 108,281
En la estación Q, al este de X, Y, Z, se
fijó un teodolito y se registró la siguien-
te información:
Calcular a, b y c
Datos estadimétricos del teodolito:
Constante aditiva = 0
Constante diastimométrica K = 100
HS, HI: Lectura estadimétrica
Punto Este(m) Norte(m)
X 285,00 320,00
Y 295,00 360,00
302,50 390,00
Estación de
Mira S H S V HS(m) HI(m)
X 0° 00' 02° 00' a 1,00
Y 19° 43' 0° 00' b 1,00
42° 52' 03° 00' c 1,00
• Estadimétricamente desde la estación Q.
Dreducida = (HS – HI)⋅100⋅Cos2
α
DX = (a – 1)⋅100⋅Cos2
(2° 00') = 99,878(a – 1)
DY = (b – 1)⋅100⋅Cos2
(0° 00') = 100,000(b – 1)
DZ = (c – 1)⋅100Cos2
(3° 00') = 99,726(c – 1)
• Analizando el gráfico:
(1)
( )
−
=
° α
99,878 a 1
41, 231
Sen 19 43' Sen
(a – 1) = 1,224⋅Sen α
(2)
( )
−
=
° ° − α
99, 726 c 1
30, 923
Sen 23 09' Sen (180 )
(c – 1) = 0,789⋅Sen α
(3) [72,154]2
= [99,878(a – 1)]2
+ [99,726(c – 1)]2
–
2[99,878(a–1)][99,726(c–1)]⋅Cos42°52'
– De (1), (2) y (3): a = 2,05 m
c = 1,68 m
– Del gráfico: b = 1,78 m
Tener presente: α = 120° 28' 30
Solución:
• Graficando el enunciado.](https://image.slidesharecdn.com/clase-topografiacompress-221116211323-9ccb5b8f/85/clase-topografia_compress-pdf-433-320.jpg)











































































