Descargar como ODP, PPTX
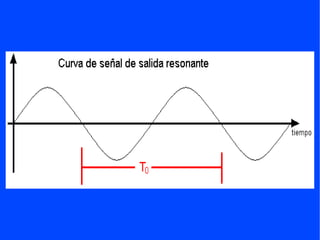
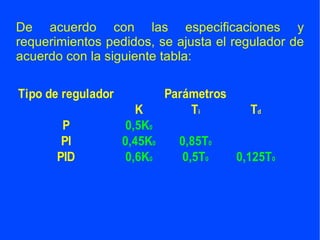

Este método de ajuste de controladores PID llamado Ziegler-Nichols parte de ajustar primero la parte proporcional para lograr resonancia en el sistema, anotando la ganancia K0 y el periodo T0. Luego usa esta información y una tabla para ajustar los parámetros del controlador PID de acuerdo a las especificaciones requeridas. Si bien es útil para sistemas cuya función de transferencia se desconoce, tiene la desventaja de estar lejos del mejor ajuste y puede llevar a inestabilidad, por lo que se re






















































































