Descargar para leer sin conexión




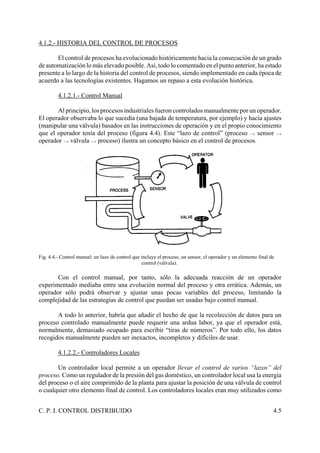

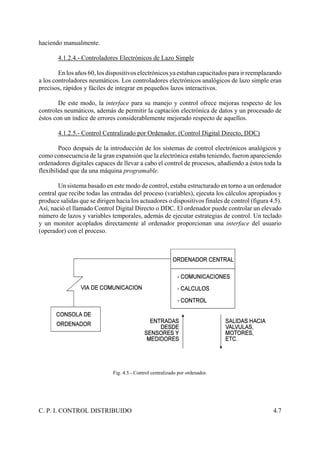







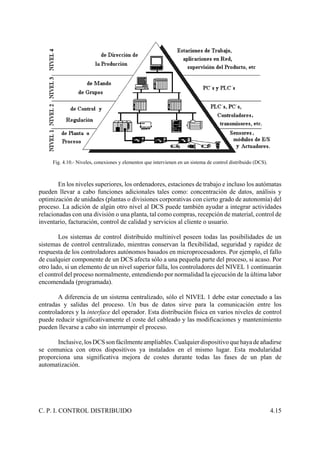




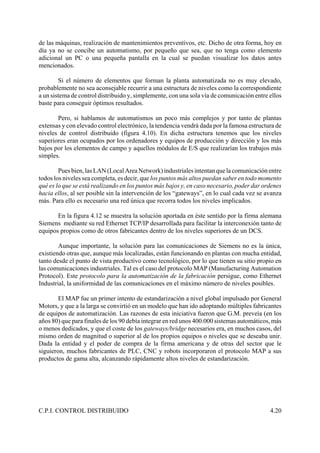








































Este documento presenta una introducción al control de procesos industriales. Explica que la medición y el control son importantes para el funcionamiento correcto de los procesos y para mantener un balance entre costes y calidad del producto final. Además, describe la evolución histórica del control de procesos, desde el control manual hasta los sistemas de control digital directo centralizados por ordenador. Finalmente, resume los objetivos generales del control de procesos como operar de forma segura, estable y congruente con los objetivos de calidad.



























































