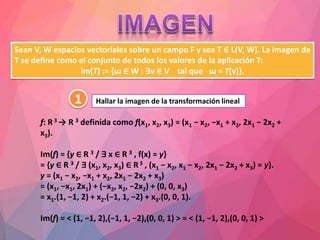
1) Las transformaciones lineales son funciones entre espacios vectoriales que preservan las operaciones vectoriales.
2) Se pueden representar mediante matrices y describen cambios de base en los espacios vectoriales.
3) Juegan un papel fundamental en álgebra lineal y sus aplicaciones en diversas áreas como matemáticas, física e ingeniería.






































![Meu Cronograma Capilar [11]](https://cdn.slidesharecdn.com/ss_thumbnails/incio-170326030612-thumbnail.jpg?width=640&height=640&fit=bounds)









































