Descargado 66 veces
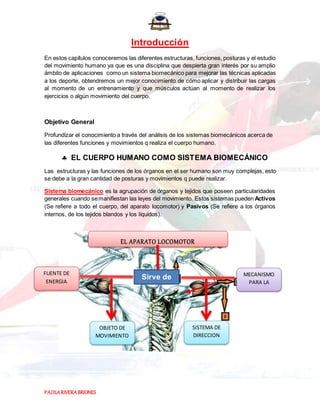
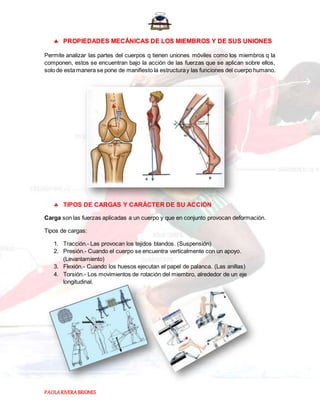


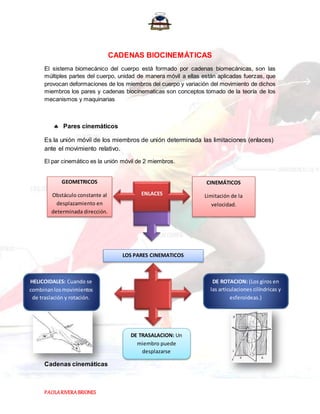







Este documento describe las características biomecánicas del cuerpo humano y sus movimientos. Explica que el cuerpo funciona como un sistema biomecánico complejo compuesto de cadenas cinéticas que permiten una variedad de movimientos a través de las articulaciones. También analiza conceptos como las palancas óseas, los tipos de fuerzas y cargas que actúan en el cuerpo, y las propiedades mecánicas de los tejidos que permiten la movilidad y elasticidad.























































































