Descargado 577 veces

![MUESTREO La mayoría de las señales que nos encontramos son señales de tiempo continuo; por ejemplo, x(t). ¿Cómo las convertimos en señales de tiempo discreto x[n]? Muestreo, tomando instantáneas de x(t) cada T segundos. Donde T es el periodo de muestreo x[n] ≡ x(nT), n = ..., -1, 0, 1, 2, ... CORRESPONDEN A muestras espaciadas a intervalos regulares Aplicaciones: DSP Imágenes en Periódicos Osciloscopio de Muestreo](https://image.slidesharecdn.com/muestreo-1229981047126075-2/85/MUESTREO-5-320.jpg)

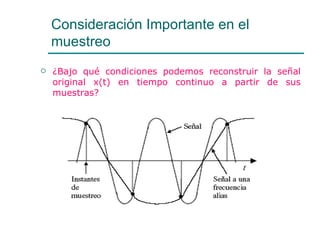
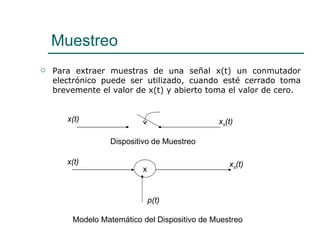

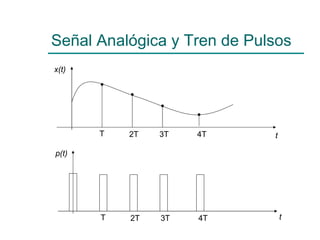
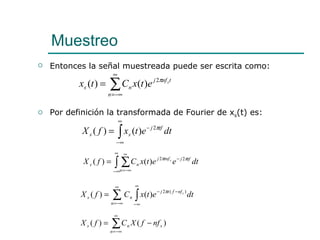

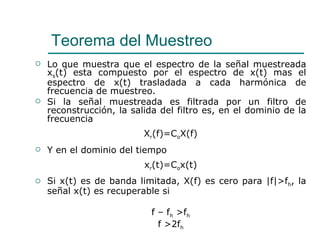


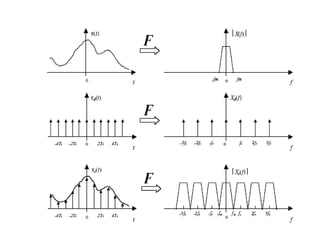


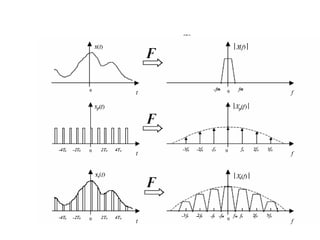
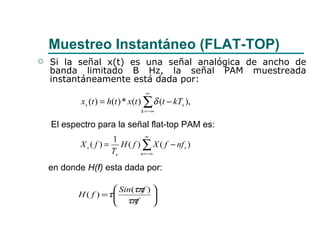






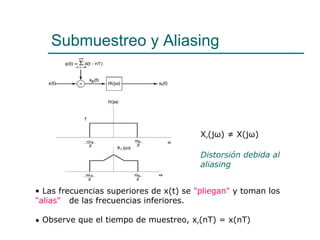







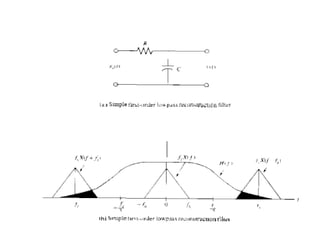


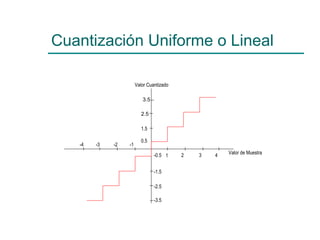
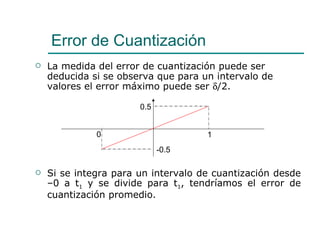
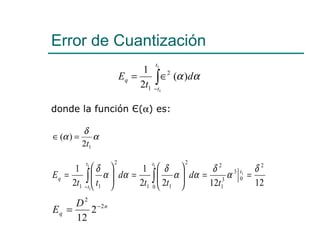


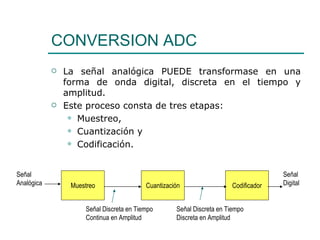
Este documento trata sobre la conversión de señales analógicas a digitales a través del muestreo, cuantización y codificación. Explica conceptos clave como el teorema de muestreo de Nyquist, que establece que la frecuencia de muestreo debe ser al menos el doble de la frecuencia máxima contenida en la señal, para poder reconstruir la señal original. También describe diferentes métodos de muestreo e interpolación, y los errores asociados con la cuantización.











































































































