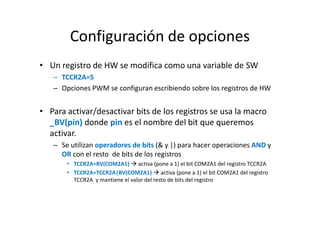
Descargar como PDF, PPTX
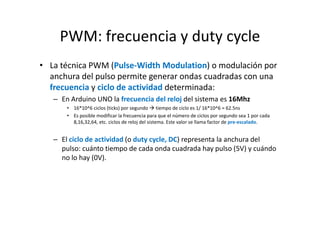
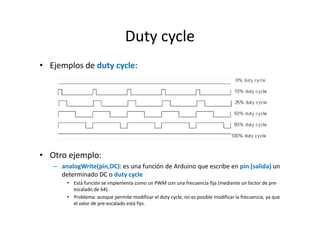
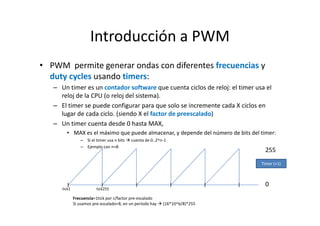
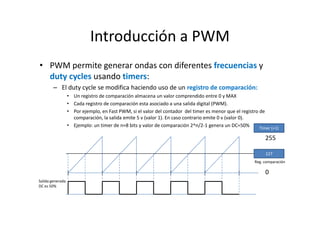
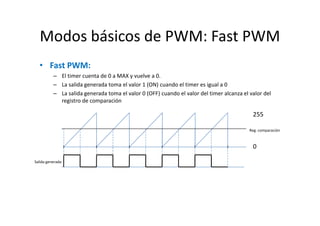
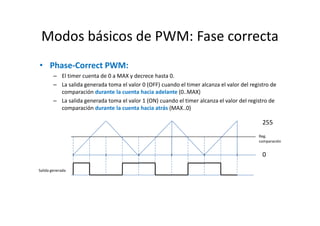
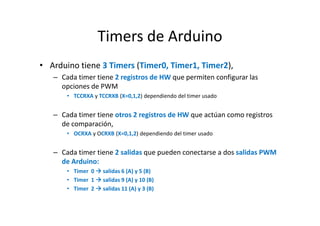
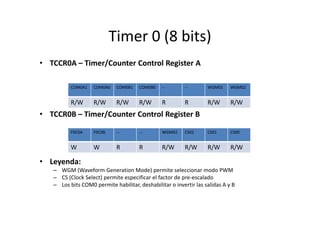
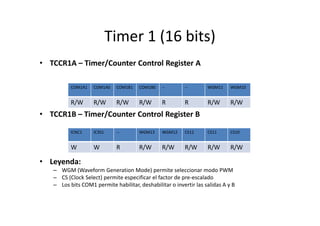
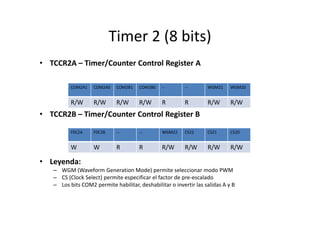

El documento introduce la técnica PWM y cómo se implementa en Arduino. Explica que PWM permite generar ondas cuadradas con diferentes frecuencias y ciclos de actividad mediante timers. Los timers de Arduino pueden configurarse para generar salidas PWM en diferentes modos como Fast PWM y Phase-Correct PWM modificando los registros de hardware.