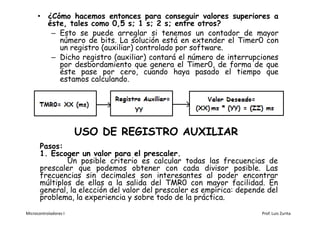
Este documento proporciona una guía rápida sobre el temporizador 0 (TMR0) y sus interrupciones en microcontroladores. Explica los registros asociados a TMR0, cómo funciona como temporizador y contador, cómo se calculan los tiempos de temporización utilizando el prescaler y cómo configurar TMR0 para generar interrupciones periódicas.
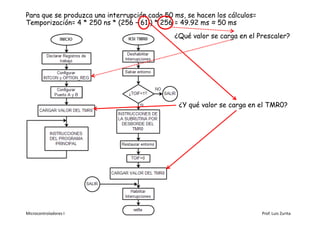
![Entonces se debe cargar 60,69, aproximado a 61 en el TMR0
para que tarde en desbordarse=
Temporización= 4 * TOSC * ValorRealTMR0 * ValorPreescaler,
sustituyendo=
Temporización= 4 * 250 ns * (256 – 61 ) * 256 = 49.92 ms ≈ 50 ms
• Para algunas temporizaciones el valor del preescaler puede
variar, siempre y cuando la resta [Valor Real TMR0 = (28 – N10) =
(256 – N10) ] sea positiva, por lo que puede darse cuenta de que
no hay un solo resultado para los ejercicios. Sin embargo, lo que
si debe cumplirse es que sea cualquiera que sean los valores que
se tomen para los cálculos, estos deben de estar cercanos a la
respuesta que se espera del temporizador que esté diseñando,
comprobando los resultados.
• Ejemplo. Diga ¿cuánto es la máxima temporización que se puede
hallar con el TMR0? Asuma que se está trabajando con un XT.
Solución: Tomamos el máximo factor de escala de división todos
los estados que puede contar el TMR0:
– Temporización= 4*0.25 μs*(256 )*256 = 65.536 ms.
– Este es el máximo valor que podemos conseguir del TMR0.
Microcontroladores I Prof. Luis Zurita](https://image.slidesharecdn.com/guarpidatmr0einterrupciones-130416161436-phpapp01/85/Guia-rapida-tmr0-e-interrupciones-9-320.jpg)