1) Se explica el principio matemático de que para cualquier matriz cuadrada existe una matriz inversa única.
2) Existen dos métodos para calcular la inversa de una matriz: resolviendo columna por columna o usando la descomposición LU.
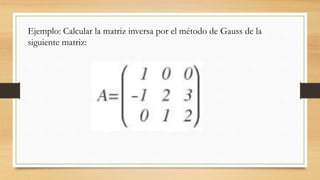
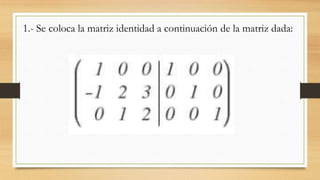
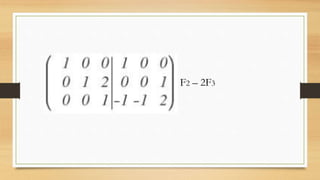
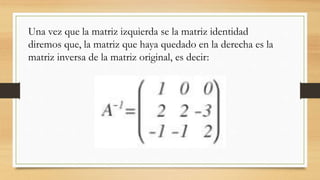
3) Se presenta un ejemplo de cómo calcular la inversa de una matriz usando el método de Gauss.
![Principio matemático
Donde:
[𝐴] : Matriz cuadrada
[𝐴]−1
: Matriz inversa
[ I ]: Matriz identidad
Si una matriz [A] es cuadrada, existe otra matriz [𝐴]−1, conocida como la inversa de[A]](https://image.slidesharecdn.com/matrizinversa-180726200612/85/Matriz-inversa-2-320.jpg)

![Cálculos estímulo-respuesta
• Ecuación de Balance para un sistema:
[A]{X} = {B}
Donde:
{X} Son los valores de la propiedad
{B} Vector de elementos del balance que son independientes (Constantes)
[A] Matriz de coeficientes que contiene los parámetros que expresan cómo interactúan las
partes del sistema.
• Otra forma de expresar la ecuación:
[interacciones]{respuesta} = {estímulos}
• Usando matriz inversa:
• {X} = [A]−1
{B}
• Determinada a partir de (multiplicación matricial):](https://image.slidesharecdn.com/matrizinversa-180726200612/85/Matriz-inversa-4-320.jpg)