Descargar para leer sin conexión





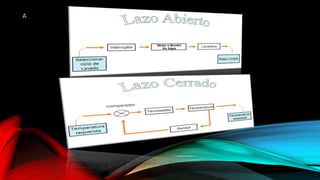






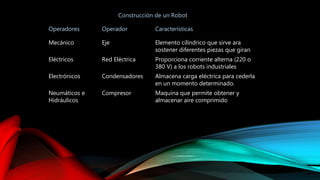


El documento resume las características de un robot, incluyendo sus componentes principales y tipos. Menciona que un robot tiene integrantes, puede ser de diferentes diseños y precisión dependiendo de su función, y que sistemas como lavadoras y neveras son considerados robots debido a que son de lazo cerrado y pueden funcionar de manera autónoma. También describe los componentes fundamentales de un robot, que incluyen la unidad mecánica, de control y de programación.













































































