Descargar para leer sin conexión
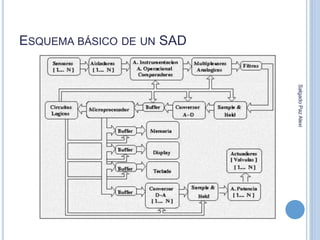

El documento describe los sistemas de adquisición de datos, incluyendo la adquisición de datos analógicos y digitales, y diferentes tipos de sistemas dedicados a la adquisición de datos como sistemas básicos, modulares, de múltiples canales e inteligentes. También describe los diferentes tipos de actuadores y sus aplicaciones, así como los requisitos y alternativas para la programación de actuadores.





























































