Descargado 199 veces


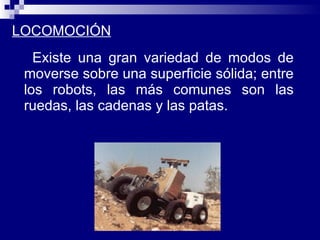







Este documento describe diferentes diseños y métodos de locomoción para robots móviles, incluyendo ruedas, cadenas y patas. También discute aplicaciones como la industria, servicios y vigilancia, así como métodos de posicionamiento como odometría, fotocélulas y códigos de barras.



































































![Sem4 Graficos Regresion Lineal [Autoguardado].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/sem4graficosregresionlinealautoguardado-230922152859-13ab247f-thumbnail.jpg?width=640&height=640&fit=bounds)














