Descargar como DOC, PPTX

![Supongamos que tenemos la siguiente rutina:
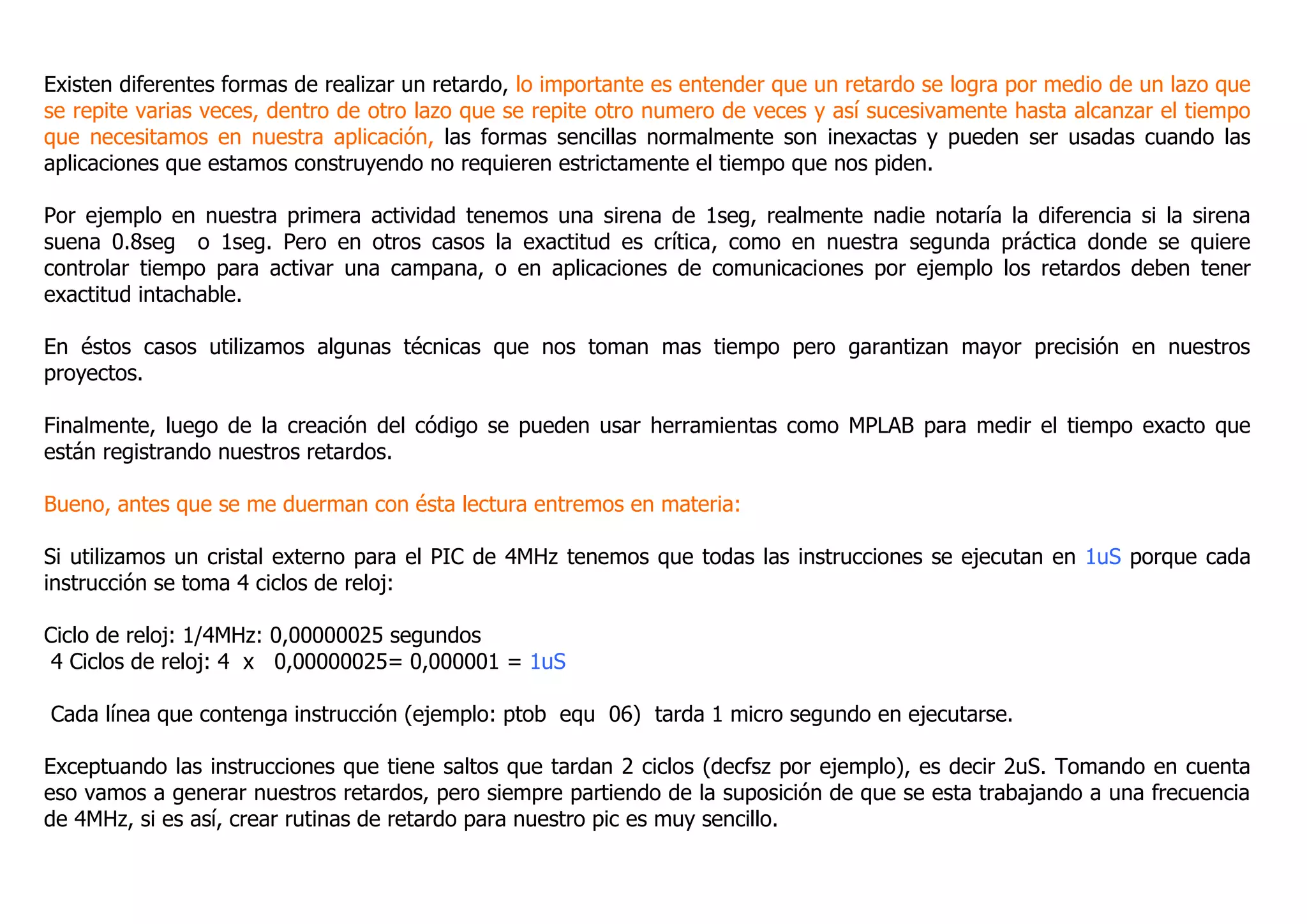
Tranquilos estas ecuaciones no muerden no salgan corriendo, necesitamos hallar N para que nuestro retardo sea de 100us.
A la derecha de cada instrucción aparece el número de ciclos que tomará cada una. Las primeras dos toman solamente 1
ciclo.
La tercera decfsz toma 1*(N-1)+2, porque decrementará N-1 veces la
variable N y en el último decremento hará un salto, es por eso el +2.
La instrucción goto se ejecuta en 2 ciclos y se ejecutará N-1 veces, es por
eso que se toma como 2*(N-1).
De esta forma tenemos que el número de ciclos, y por lo tanto el tiempo que
tendremos de retardo está dado por la siguiente expresión:
1 + 1 + (1)*(N-1)+2 + (2)*(N-1) , ó
4 + (N-1) + (2N-2) , o lo que es lo mismo
[3N+1]
Si queremos un retardo de 100uS entonces tenemos que 3N+1=100 porque:
100uS / 1uS que demora cada instrucción: 100](https://image.slidesharecdn.com/retr-140330160709-phpapp02/85/Rutinas-de-retardo-2-320.jpg)
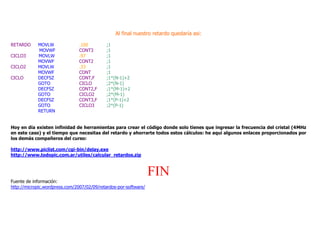
![Despejando tenemos N=(100-1)/3=33, así que para tener un retardo de 100uS el valor de la variable N debe ser 33.
Ahora veamos esta rutina:
Podemos darnos cuenta que ahora nuestra rutina
original (desde CICLO2 hasta goto CICLO) está afectada
por la variable M, así que es como si M multiplicara a
nuestro retardo. Para saber el nuevo valor del retardo de
nuevo sumamos todos los ciclos, tomando en cuenta que
M multiplica al retardo original de modo que la expresión
ahora queda de la siguiente manera:
1 +1 + [3N+1]*M + (1)*(M-1)+2 + (2)*(M-1), ó
o lo que es lo mismo:
1 +1 + [3N+1]*M + M -1 +2 + 2M – 2 , ó
[3N+1]*M + 3M + 1
De manera que tenemos dos retardos anidados. Para saber cuanto sería el retardo total primero calculamos el retardo
básico, si queremos que ese retardo sea de 100uS entonces N=33, si ahora queremos que el retardo total sea de 10mS
entonces ocupamos completar 10000 ciclos(10mS) porque:
10mS/ 1uS que demora cada instrucción: 10000
Así que igualamos nuestra expresión a ese número:
[(3*33)+1]*M+3M+1=10000, despejando tenemos M=(9999)/103, esto es aproximadamente igual a 97, así que para un
retardo de 10mS nuestra variable N debe valer 33 y la variable M debe tener un valor de 97](https://image.slidesharecdn.com/retr-140330160709-phpapp02/85/Rutinas-de-retardo-3-320.jpg)
![Cansados? Yo también, pero ánimo si
entendemos esta parte no tendremos
mas dudas acerca de los retardos,
sigamos…
Así podemos seguir anidando retardos.
Para obtener un retardo de 1 segundo
utilizaremos la siguiente rutina.
Aquí vemos que la variable P afecta a
los dos retardos que ya habíamos
definido de modo que la expresión para
calcular el nuevo retardo total seria:
1 +1 + [[3N+1]*M + 3M + 1]*P + (1)*(P-1)+2 + (2)*(P-1) , ó
1 +1 + [[3N+1]*M + 3M + 1]*P + P-1+2 + 2P-2 , y reduciendo términos la expresión seria:
[[3N+1]*M + 3M + 1]*P + 3P + 1
Queremos un retardo de 1 segundo, esto son 1.000.000 ciclos porque:
1/ 1uS que demora cada instrucción: 1.000.000
Por lo que nuestra expresión del retardo debe ser igual a un millón: [[3N+1]*M + 3M + 1]*P +3P+1=1.000.000
Sustituyendo N y M tenemos 9995P+1=1000000, entonces tenemos que P=(999999)/9995 y P entonces es
aproximadamente igual a 100.](https://image.slidesharecdn.com/retr-140330160709-phpapp02/85/Rutinas-de-retardo-4-320.jpg)

El documento explica diferentes formas de implementar retardos en aplicaciones de PIC usando bucles anidados. Los retardos simples pueden no ser precisos, mientras que en aplicaciones críticas se requiere exactitud. Se proporcionan ejemplos de código para calcular los valores necesarios de variables para lograr retardos específicos usando la frecuencia del cristal. Finalmente, se mencionan herramientas que pueden calcular automáticamente los retardos requeridos.