Descargado 26 veces
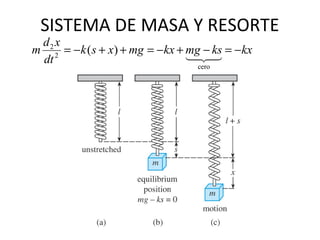
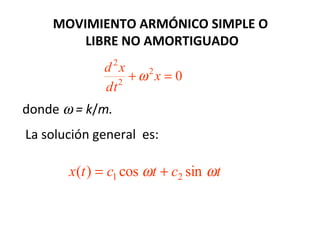
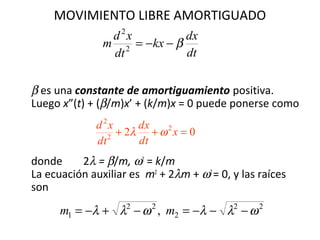
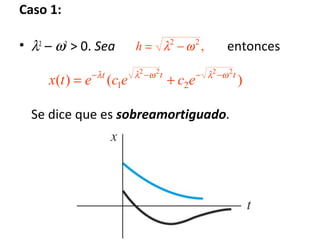
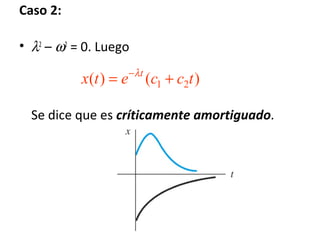
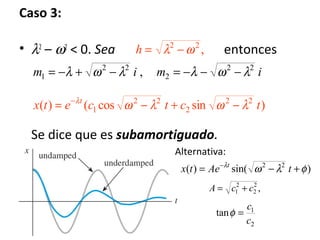
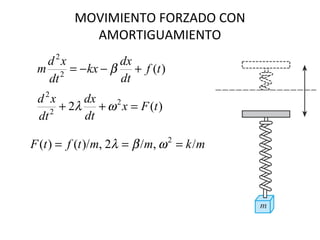
Este documento describe el movimiento armónico simple y el movimiento libre amortiguado. El movimiento armónico simple se describe mediante una ecuación diferencial del segundo orden. El movimiento libre amortiguado se modela mediante otra ecuación diferencial que incluye un término de amortiguamiento. Existen tres casos posibles para este movimiento dependiendo de si es sobreamortiguado, críticamente amortiguado o subamortiguado.



































































