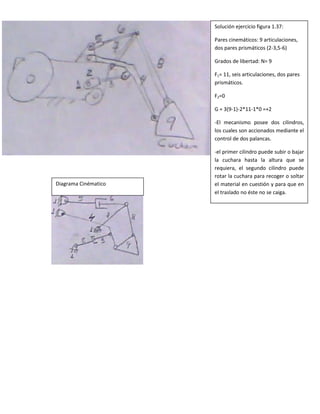
Este documento contiene las soluciones a varios ejercicios sobre mecanismos. Resume cuatro mecanismos con sus componentes y grados de libertad, incluyendo un mecanismo con una cuchara accionada por dos cilindros. Calcula los grados de libertad de cada mecanismo usando la fórmula de Gruebler.