Descargado 39 veces
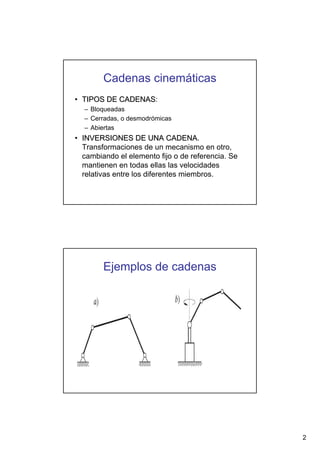
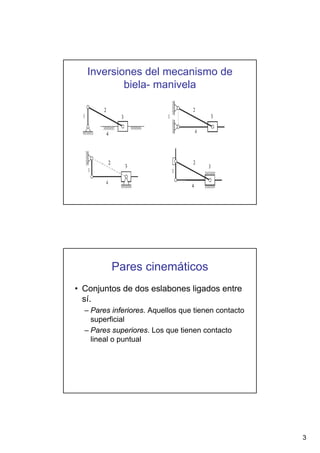
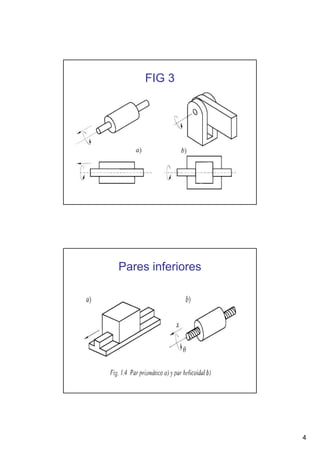
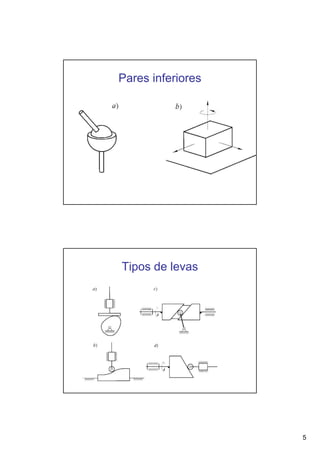
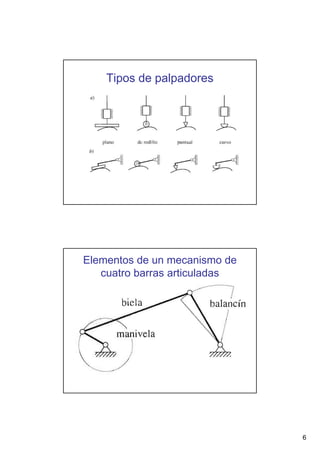
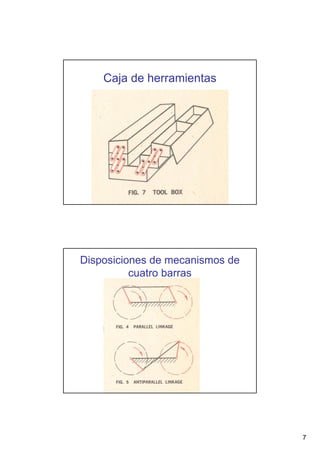




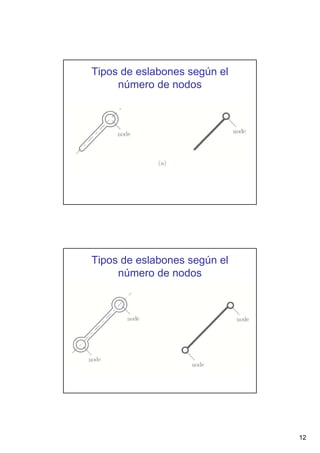











Este documento presenta conceptos básicos sobre sistemas mecánicos y mecanismos. Define términos como miembro, cadena cinemática y eslabón. Explica tipos de cadenas como bloqueadas, cerradas y abiertas, e introduce conceptos como inversiones de cadenas y pares cinemáticos. Finalmente, cubre temas como mecanismos planos, grados de libertad, coordenadas generalizadas y varios ejemplos de mecanismos como el mecanismo de biela-manivela y el mecanismo






















































