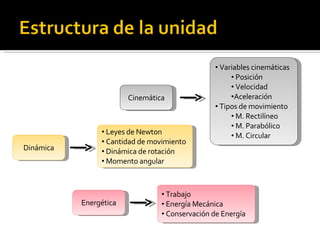
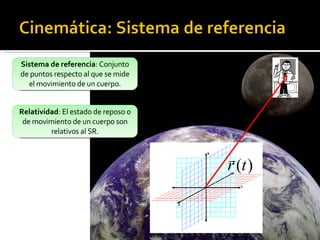
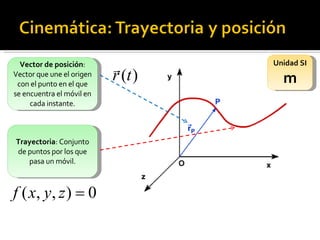
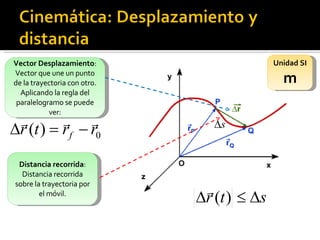
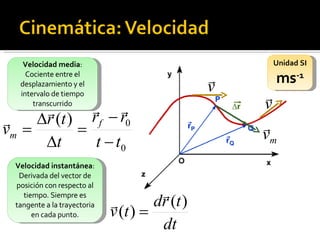
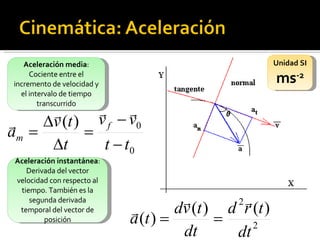
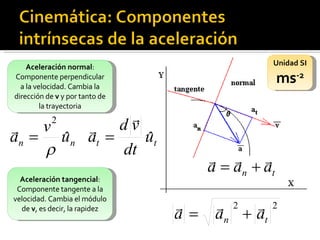
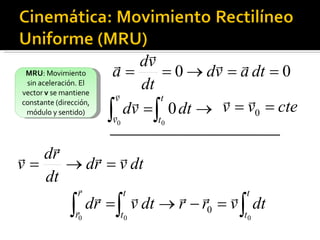
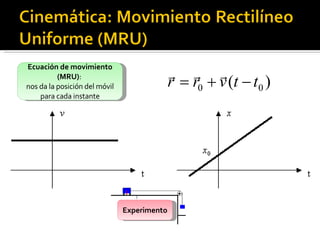
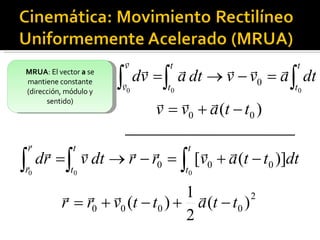
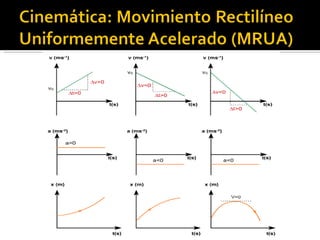
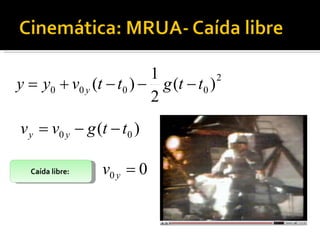
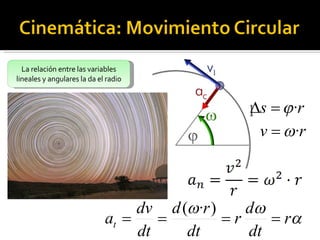
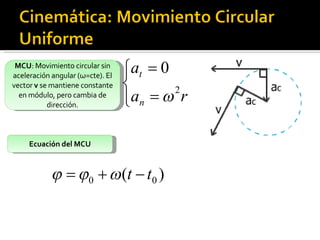
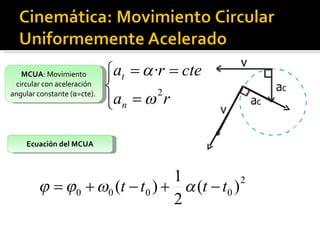
El documento resume conceptos básicos de cinemática y dinámica. Explica variables cinemáticas como posición, velocidad y aceleración, así como tipos de movimiento rectilíneo, parabólico y circular. También cubre leyes de Newton, cantidad de movimiento, energía y conservación de energía. Define sistemas de referencia y relatividad del movimiento. Por último, analiza movimiento circular uniforme y acelerado, así como ecuaciones que relacionan variables angulares y lineales.