
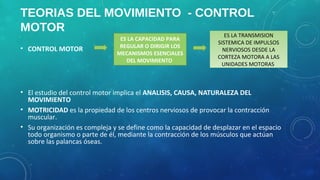





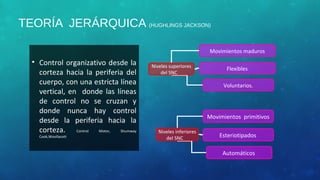


















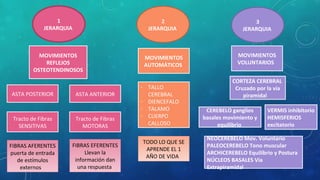



El documento presenta información sobre teorías del control motor. Explica que 1) el control motor implica la regulación del movimiento a través de la transmisión de impulsos nerviosos desde la corteza motora a las unidades motoras, 2) existen varias teorías que intentan explicar la causa y naturaleza del movimiento como la teoría refleja, la teoría jerárquica y la teoría de programación motora, y 3) cada teoría tiene implicancias clínicas diferentes en relación a la evaluación y tratamiento del control motor.























































































