Descargar para leer sin conexión
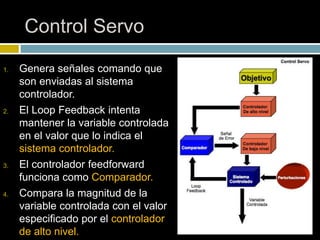
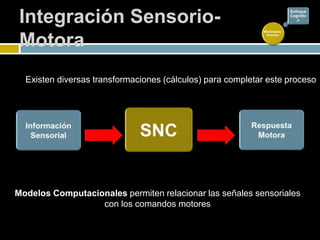

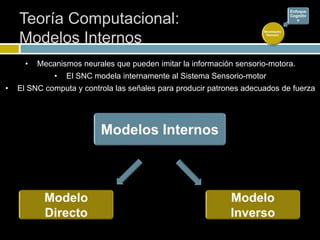

El documento describe diferentes teorías sobre el control motor de sistemas multiarticulares. Presenta las teorías refleja, jerárquica, de programas motores, de sistemas, ecológica y computacional, describiendo sus conceptos clave, limitaciones e implicancias clínicas. Además, explica conceptos como patrones generadores centrales, estrategias de movimiento, feedback y feedforward en el control motor.



































































