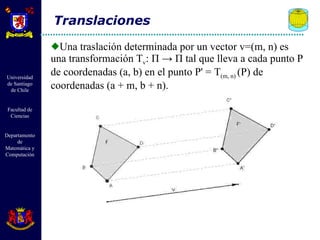
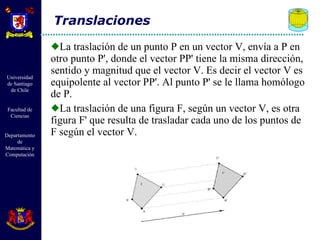
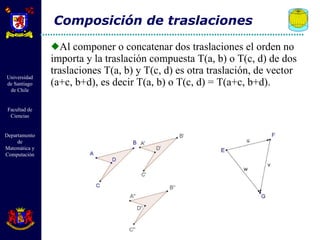
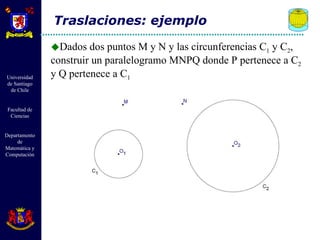
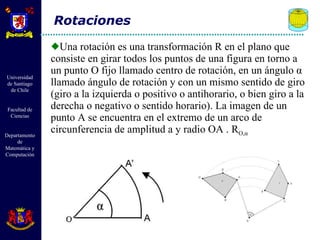
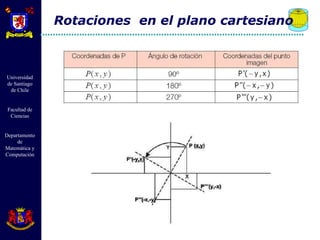
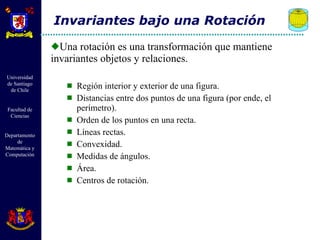
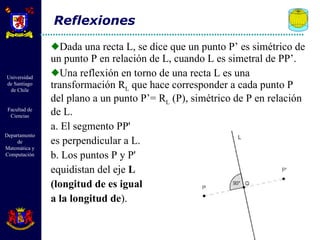
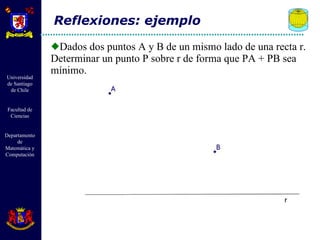
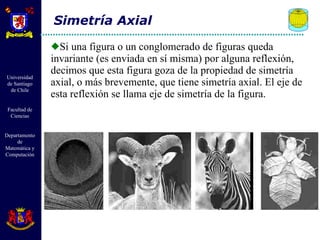
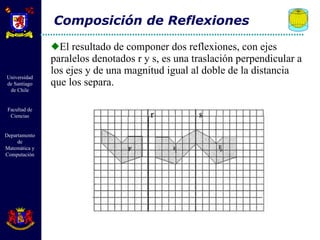
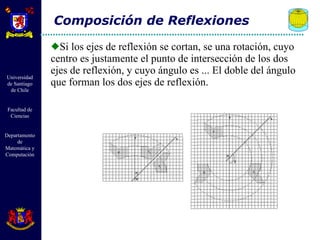
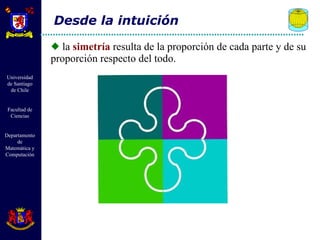
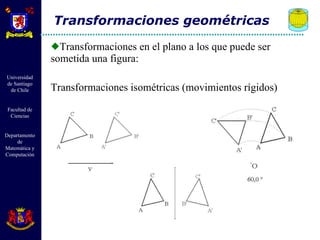
El documento describe diferentes tipos de transformaciones isométricas en geometría euclidiana, incluyendo traslaciones, rotaciones y reflexiones. Las traslaciones mueven cada punto de una figura por un mismo vector. Las rotaciones giran todos los puntos de una figura alrededor de un punto fijo. Las reflexiones crean puntos simétricos de cada punto a través de un eje. Estas transformaciones preservan distancias y ángulos.

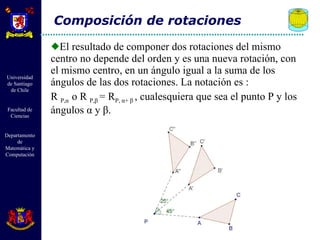
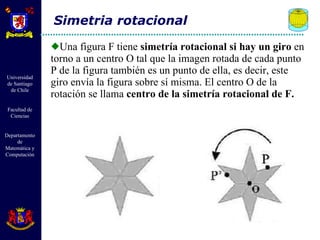
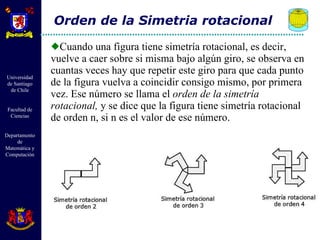
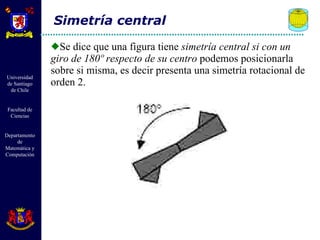
![Dada una transformación T, que a cada punto P de un plano Π le hace corresponder un punto P’=T(P) de Π . Se dice que T es una Isometría , si y sólo si, cuando: d[A,B]=d[T(A),T(B)] para cualquier par de puntos A y B del plano Π . Toda Isometría posee las siguientes propiedades: a.- La imagen de una recta por una isometría es una recta. b.- una Isometría preserva el paralelismo. c.- preserva ángulos. Como consecuencia de la definición, la imagen de una figura F por una Isometría, es una figura F’ congruente a F. Transformaciones isométricas](https://image.slidesharecdn.com/transformacionesisometricas-100831232824-phpapp02/85/Transformaciones-isometricas-9-320.jpg)