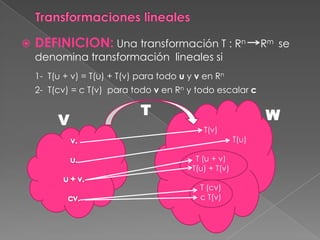
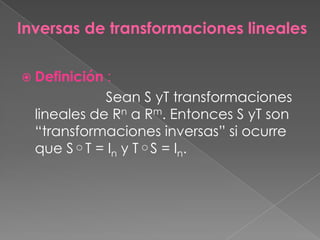
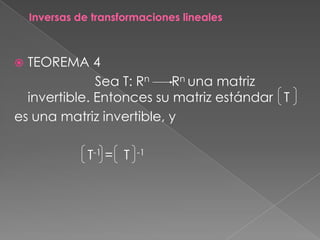
Este documento resume las transformaciones lineales. Define transformaciones lineales como funciones entre espacios vectoriales que preservan la suma y la multiplicación por escalares. Presenta ejemplos de transformaciones lineales como reflexiones y rotaciones. Explica que las transformaciones lineales pueden representarse mediante matrices y que la composición y inversa de transformaciones lineales también son transformaciones lineales.