Descargado 95 veces
![Cálculo de
Elementos de
Máquinas
[TP 2 Y 3: ENGRANAJES
RECTOS Y HELICOIDALES]
Integrantes:
Boldrini, Mariano
Navarro, Martín
Niro, Nicolás
Thibaud, Soledad](https://image.slidesharecdn.com/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-150709205913-lva1-app6892/85/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-1-320.jpg)
![Cálculo de
Elementos de
Máquinas
[TP 2 Y 3: ENGRANAJES
RECTOS Y HELICOIDALES]
Integrantes:
Boldrini, Mariano
Navarro, Martín
Niro, Nicolás
Thibaud, Soledad](https://image.slidesharecdn.com/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-150709205913-lva1-app6892/75/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-1-2048.jpg)







![11
Lewis
Se procede a calcular la carga tangencial máxima admisible Fb
𝐹𝑏 = 𝑏 × 𝑦 × 𝑝 𝑛 × 𝜎𝑎𝑑𝑚 = 2,45 𝑐𝑚 × 0,1 × 0,47 𝑐𝑚 × 2109,7 𝐾𝑔 𝑐𝑚2⁄ = 242,9 𝑘𝑔
Esta fuerza debe ser mayor que la fuerza tangencial que está siendo transmitida al
engranaje Ft.
𝐹𝑡 = 71620 ×
𝑁
𝑛 × 𝑟𝑝
= 71620 ×
3𝐻𝑃
1440 𝑟𝑝𝑚 × 1,038 𝑐𝑚
= 143,75 𝑘𝑔
Se verifica que la fuerza transmitida es menor a la admisible.
Lewis-Barth
𝐾𝑣 =
43
43 + √ 𝑣 𝑝
Donde 𝑣 𝑝[m/min] es la velocidad en la circunferencia primitiva.
𝑣 𝑝 = 2𝜋𝑟𝑝 × 𝑛 = 2𝜋 × 0,01038 𝑚 × 1440 𝑟𝑝𝑚 = 94 𝑚/𝑚𝑖𝑛
𝐾𝑣 =
43
43 + √94
= 0,816
𝐹𝑏 = 𝑏 × 𝑦 × 𝑝 𝑛 × 𝜎𝑎𝑑𝑚 × 𝐾𝑣 =
= 2,45 𝑐𝑚 × 0,1 × 0,47 𝑐𝑚 × 2109,7 𝐾𝑔 𝑐𝑚2⁄ × 0,816 = 198,2 𝑘𝑔
Se vuelve a verificar que la fuerza transmitida es menor que la admisible considerando
ahora el factor dinámico, pues 𝐹𝑡 = 143,75 𝑘𝑔 ≤ 𝐹𝑏 = 198,2 𝑘𝑔.
Buckingham
Este método para el cálculo de engranajes se basa en la carga dinámica, en el límite de
fatiga del material y en el esfuerzo de desgaste.
El esfuerzo máximo total instantáneo sobre el diente, o esfuerzo dinámico, está
constituido por la caga transmitida más un incremento de carga.
𝑃 𝑑 = 𝐹𝑡 + ∆𝑃](https://image.slidesharecdn.com/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-150709205913-lva1-app6892/85/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-11-320.jpg)
![12
Siendo:
∆𝑃 =
0,113 × 𝑣 𝑝 × cosΨ × ( 𝐹𝑡 + 𝑏 × 𝐶 × cos2
Ψ)
0,113 × 𝑣 𝑝 + √𝐹𝑡 + 𝑏 × 𝐶 × cos2 Ψ
Donde C es un factor que depende de la magnitud del error y de los módulos de
elasticidad de los engranajes (𝐸1 𝑦 𝐸2 [𝑘𝑔/𝑐𝑚2]).
𝐶 =
𝑘 × 𝐸1 × 𝐸2
𝐸1 + 𝐸2
Siendo k función del error efectivo o total compuesto del diente e, que debe ser menor
a velocidades más altas. Se toma 𝑘 = 0,111 × 𝑒 (altura completa y 20º).
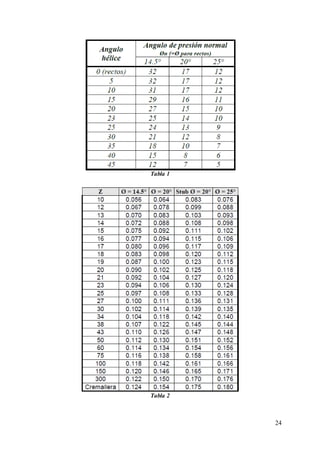
Para encontrar el valor del error admisible, se entra al (Apéndice-Gráfico 1, pág 21)
con el valor de 𝑣 𝑝 = 94 𝑚/𝑚𝑖𝑛, se corta a la curva y se obtiene el valor del error en el eje
vertical. En este caso el error vale 𝑒 ≅ 0,0115 𝑐𝑚.
Luego en el (Apéndice-Gráfico 2, pág 21) se entra con el valor del modulo (𝑀 𝑛 =
1,5 𝑚𝑚), y se baja hasta la curva de engranajes comerciales (o la del tipo de engranajes que
se quiera utilizar). Cortando al eje vertical se obtiene así el valor del error probable (𝑒 ≅
0,0058 𝑐𝑚). Este error es el que se usa para calcular k, siempre que sea menor al obtenido en
el Gráfico 1.
𝑘 = 0,111 × 0,005 𝑐𝑚 = 0,0006 𝑐𝑚
Y como los dos engranajes son de acero, sus módulos de elasticidad longitudinal son
iguales (𝐸1 = 𝐸2 = 𝐸 = 2100000 𝑘𝑔/𝑐𝑚2).
𝐶 =
0,0006 × (2100000𝑘𝑔 𝑐𝑚2⁄ )2
2 × 2100000 𝑘𝑔 𝑐𝑚2⁄
= 630 𝑘𝑔/𝑐𝑚2
∆𝑃 =
0,113 × 94 𝑚/𝑚𝑖𝑛 × cos 30° × (143,75 𝑘𝑔+ 2,45 𝑐𝑚 × 630
𝑘𝑔
𝑐𝑚
× cos2
30°)
0,113 × 94 𝑚/𝑚𝑖𝑛 + √143,75 𝑘𝑔 + 2,45 𝑐𝑚 × 630
𝑘𝑔
𝑐𝑚
× cos2 30°
= 256,4 𝑘𝑔
𝑃 𝑑 = 143,75 𝑘𝑔 + 256,4 𝑘𝑔 = 400 𝑘𝑔
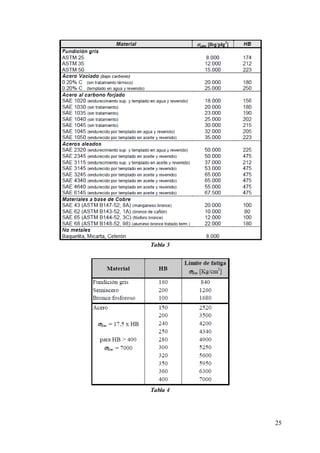
A pesar que la fuerza que actúa sobre los dientes del engranaje es constante, la carga
que incide sobre cada uno de ellos es variable en el tiempo. Para tener en cuenta este efecto
se toma como tensión de comparación el límite de fatiga a la flexión 𝜎𝑙𝑖𝑚 (Apéndice-Tabla
4). La carga dinámica así determinada se introduce en la formula de Lewis, resultando el
estado de tensiones:
𝜎 =
𝑃 𝑑
𝑏 × 𝑦 × 𝑝 𝑛
≤ 𝜎𝑎𝑑𝑚−𝑙𝑖𝑚](https://image.slidesharecdn.com/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-150709205913-lva1-app6892/85/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-12-320.jpg)


![15
Lewis
Se obtiene el número virtual de dientes Zv
𝑍 𝑣 =
𝑍
cos3 Ψ
=
29
0,65
= 44,6 𝑑𝑖𝑒𝑛𝑡𝑒𝑠 ≅ 47 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
Con este dato y con el ángulo de presión se obtiene un factor de forma 𝑦 = 0,104
(Apéndice-Tabla 2, pág 23).
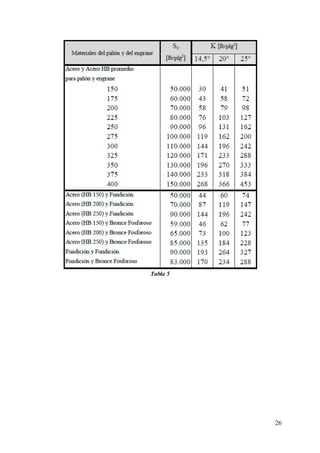
Se procede a calcular la carga tangencial máxima admisible Fb
𝜎𝑎𝑑𝑚 = 2109,7 𝑘𝑔 𝑐𝑚2⁄
𝐹𝑏 = 𝑏 × 𝑦 × 𝑝 𝑛 × 𝜎𝑎𝑑𝑚 = 2,5 𝑐𝑚 × 0,104 × 0,47 𝑐𝑚 × 2109,7 𝑘𝑔 𝑐𝑚2⁄ = 257,8 𝑘𝑔
Esta fuerza debe ser mayor que la fuerza tangencial que está siendo transmitida al
engranaje Ft.
𝐹𝑡 = 71620 ×
𝑁
𝑛 × 𝑟𝑝
= 71620 ×
3𝐻𝑃
1440 𝑟𝑝𝑚 × 2,5 𝑐𝑚
= 59,4 𝑘𝑔
Se verifica que la fuerza transmitida es menor a la admisible.
Lewis-Barth
𝐾𝑣 =
43
43 + √ 𝑣 𝑝
Donde 𝑣 𝑝[m/min] es la velocidad en la circunferencia primitiva.
𝑣 𝑝 = 2𝜋𝑟𝑝 × 𝑛 = 2𝜋 × 0,025 𝑚 × 1440 𝑟𝑝𝑚 = 227,23 𝑚/𝑚𝑖𝑛
𝐾𝑣 =
43
43 + √227,23
= 0,74
𝐹𝑏 = 𝑏 × 𝑦 × 𝑝 𝑛 × 𝜎𝑎𝑑𝑚 × 𝐾𝑣 =
= 2,5 𝑐𝑚 × 0,041 × 0,471 𝑐𝑚 × 1056 𝐾𝑔 𝑐𝑚2⁄ × 0,74
𝐹𝑏 = 93,83 𝑘𝑔](https://image.slidesharecdn.com/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-150709205913-lva1-app6892/85/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-15-320.jpg)
![16
Se vuelve a verificar que la fuerza transmitida es menor que la admisible considerando
ahora el factor dinámico, pues 𝐹𝑡 = 59,4 𝑘𝑔 ≤ 𝐹𝑏 = 93,83 𝑘𝑔.
Buckingham
𝑃 𝑑 = 𝐹𝑡 + ∆𝑃
Con:
∆𝑃 =
0,113 × 𝑣 𝑝 × cosΨ × ( 𝐹𝑡 + 𝑏 × 𝐶 × cos2
Ψ)
0,113 × 𝑣 𝑝 + √𝐹𝑡 + 𝑏 × 𝐶 × cos2 Ψ
Donde C es un factor que depende de la magnitud del error y de los módulos de
elasticidad de los engranajes (E1 y E2 [Kg/cm2]).
𝐶 =
𝑘 × 𝐸1 × 𝐸2
𝐸1 + 𝐸2
Siendo k función del error efectivo o total compuesto del diente e, que debe ser menor a
velocidades más altas. Se toma 𝑘 = 0,111 × 𝑒 (altura completa y 20º).
Para encontrar el valor del error admisible, se entra al (Apéndice-Gráfico 1, pág 22)
con el valor de 𝑣 𝑝 = 227,23 𝑚/𝑚𝑖𝑛, se corta a la curva y se lee el valor del error en el eje
vertical. En este caso el error vale 𝑒 ≅ 0,008 𝑐𝑚.
Luego en el (Apéndice-Gráfico 2, pág 22) se entra con valor del módulo (𝑀 𝑛 =
1,5 𝑚𝑚), y se baja hasta la curva de engranajes comerciales (o la del tipo de engranajes que
se quiera utilizar). Cortando al eje vertical se obtiene así el valor del error probable (𝑒 ≅
0,0058 𝑐𝑚). Este error es el que se usa para calcular k, siempre que sea menor al obtenido en
el Gráfico 1.
𝑘 = 0,111 × 0,005 𝑐𝑚 = 0,0006 𝑐𝑚
Y como los dos engranajes son de acero, sus módulos de elasticidad longitudinal son
iguales (𝐸1 = 𝐸2 = 𝐸 = 2100000 𝑘𝑔/𝑐𝑚2).
𝐶 =
0,0006 × (2100000 𝑘𝑔 𝑐𝑚2⁄ )2
2 × 2100000 𝑘𝑔 𝑐𝑚2⁄
= 630 𝑘𝑔/𝑐𝑚
∆𝑃 =
0,113 × 227,23 𝑚/𝑚𝑖𝑛 × cos30° × (59,4 𝑘𝑔+ 2,5 𝑐𝑚 × 630
𝑘𝑔
𝑐𝑚 × cos2
30°)
0,113 × 227,23 𝑚/𝑚𝑖𝑛 + √59,4 𝑘𝑔 + 2,5 𝑐𝑚 × 630
𝑘𝑔
𝑐𝑚
× cos2 30°
∆𝑃 = 30,5 𝑘𝑔
𝑃 𝑑 = 59,4 𝑘𝑔 + 30,5 𝑘𝑔 = 89,9 𝑘𝑔](https://image.slidesharecdn.com/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-150709205913-lva1-app6892/85/38635375-tp-2-y-3-diseno-de-engranajes-rectos-y-helicoidales-16-320.jpg)





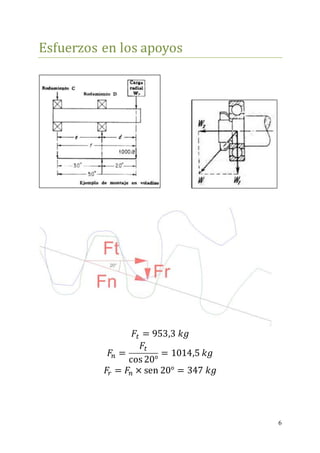
Este documento resume el cálculo de engranajes rectos y helicoidales para una máquina. Calcula las velocidades de rotación de los diferentes engranajes rectos y determina el módulo y paso de los engranajes. Luego, calcula las fuerzas en los engranajes helicoidales y verifica que no excedan los límites de diseño. Finalmente, determina las reacciones en los apoyos de los engranajes.










![1) sistemas hidráulicos[1]](https://cdn.slidesharecdn.com/ss_thumbnails/1sistemashidrulicos1-111122190747-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)












































































