Descargado 24 veces
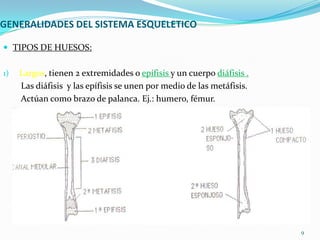
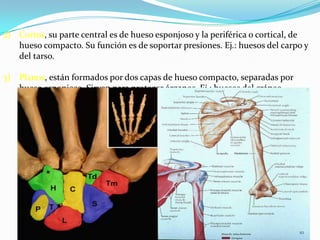
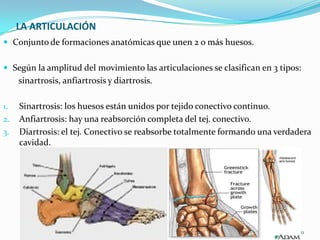
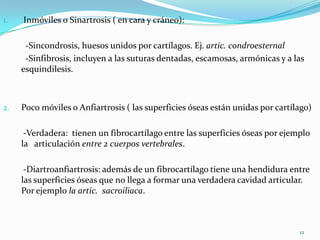
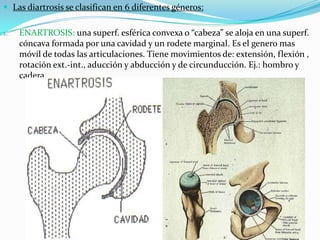

El documento describe los conceptos básicos de la anatomía osteoarticulomuscular, incluyendo la posición anatómica, los planos corporales, los tipos y funciones de los huesos y articulaciones, y los tipos y funciones de los músculos. Explica los diferentes tipos de articulaciones según su movilidad y estructura, así como los elementos que las componen. También describe los diferentes tipos y funciones de los músculos del cuerpo.























































































