Colegio nacional nicolas esguerra
•Descargar como DOCX, PDF•
0 recomendaciones•153 vistas
El documento describe 4 tipos de movimientos programados para un robot Lego Mindstorms: movimiento recto y giro, rotación sobre su eje, movimiento ondulatorio en forma de zic-zac, y giro de 360 grados. Cada movimiento es explicado brevemente.
Denunciar
Compartir
Denunciar
Compartir

Recomendados
Pte
El documento describe tres experimentos de movimiento realizados con un robot Lego Mindstorms NXT. En el primer experimento, el robot se mueve en línea recta y luego gira 45 grados antes de continuar recto. En el segundo, el robot gira 360 grados sobre su eje central. En el tercer experimento, el robot sigue un movimiento ondulante en línea recta.
Pte
El documento describe los movimientos básicos de un robot Lego Mindstorms NXT, incluyendo moverse en línea recta, girar 45 grados y continuar en línea recta, y girar 360 grados sobre su propio eje. El robot es controlado para elegir estos movimientos rectos y de giro de forma determinada.
Practicas de robótica
Este documento presenta 10 prácticas de robótica educativas con objetivos como hacer que un robot patrulle, siga un cuadrado o espiral, esquive obstáculos, evite caer por un borde, vuelva a su punto de partida, siga una línea, encuentre una fuente de luz, atrape una lata y controle el acceso a un estacionamiento. Para cada práctica, explica brevemente los conceptos y técnicas necesarias como medir tiempos, usar sensores, bucles, control en lazo abierto o cerrado.
Machote de mecanismos
Este documento presenta varias propuestas de mecanismos robóticos educativos para diferentes grados escolares. Cada propuesta incluye mecanismos, tipos de movimiento de entrada y salida, y aplicaciones prácticas. Los mecanismos propuestos incluyen poleas, ruedas dentadas, excéntricas, y más. Las aplicaciones sugeridas van desde personajes animados hasta máquinas industriales. El autor también analiza su proceso de construcción de los mecanismos y cómo superó retos con recursos limitados.
Machote de mecanismos milton lobo
Una descripción de los mecanismos que utilizaremos en los talleres de Robótica Educativa en el año 2018.
Construcción de mecanismos
Esta presentación contiene el estudio de dos mecanismos por grado aplicados a la robótica educativa..
Mecanismos propuesta educativa
Este documento presenta propuestas educativas sobre robótica para diferentes grados escolares, incluyendo los mecanismos que se estudiarían y sus aplicaciones en la vida real. Cada propuesta detalla los mecanismos como excéntrica biela palanca, sistema de palancas, engranaje simple y otros; y ejemplos de cómo se usan como simular el movimiento de animales, operar agujas de parqueo y transportar objetos. El documento concluye reflexionando sobre los logros y desafíos del proceso de aprendizaje sobre mecanism
Machote de mecanismos
El documento describe 6 mecanismos diferentes compuestos por varios elementos como poleas, ruedas dentadas, tornillos sin fin y cremalleras. Cada mecanismo transforma un movimiento giratorio de entrada en uno circular, lineal alterno o lineal de salida. Se proveen ejemplos de cómo cada mecanismo se aplica en objetos de la vida real como máquinas de coser, sillas eléctricas y taladros. Adicionalmente, se describen 3 mecanismos compuestos y sus aplicaciones en robots exploradores. Finalmente, el autor resume su experiencia constru
Recomendados
Pte
El documento describe tres experimentos de movimiento realizados con un robot Lego Mindstorms NXT. En el primer experimento, el robot se mueve en línea recta y luego gira 45 grados antes de continuar recto. En el segundo, el robot gira 360 grados sobre su eje central. En el tercer experimento, el robot sigue un movimiento ondulante en línea recta.
Pte
El documento describe los movimientos básicos de un robot Lego Mindstorms NXT, incluyendo moverse en línea recta, girar 45 grados y continuar en línea recta, y girar 360 grados sobre su propio eje. El robot es controlado para elegir estos movimientos rectos y de giro de forma determinada.
Practicas de robótica
Este documento presenta 10 prácticas de robótica educativas con objetivos como hacer que un robot patrulle, siga un cuadrado o espiral, esquive obstáculos, evite caer por un borde, vuelva a su punto de partida, siga una línea, encuentre una fuente de luz, atrape una lata y controle el acceso a un estacionamiento. Para cada práctica, explica brevemente los conceptos y técnicas necesarias como medir tiempos, usar sensores, bucles, control en lazo abierto o cerrado.
Machote de mecanismos
Este documento presenta varias propuestas de mecanismos robóticos educativos para diferentes grados escolares. Cada propuesta incluye mecanismos, tipos de movimiento de entrada y salida, y aplicaciones prácticas. Los mecanismos propuestos incluyen poleas, ruedas dentadas, excéntricas, y más. Las aplicaciones sugeridas van desde personajes animados hasta máquinas industriales. El autor también analiza su proceso de construcción de los mecanismos y cómo superó retos con recursos limitados.
Machote de mecanismos milton lobo
Una descripción de los mecanismos que utilizaremos en los talleres de Robótica Educativa en el año 2018.
Construcción de mecanismos
Esta presentación contiene el estudio de dos mecanismos por grado aplicados a la robótica educativa..
Mecanismos propuesta educativa
Este documento presenta propuestas educativas sobre robótica para diferentes grados escolares, incluyendo los mecanismos que se estudiarían y sus aplicaciones en la vida real. Cada propuesta detalla los mecanismos como excéntrica biela palanca, sistema de palancas, engranaje simple y otros; y ejemplos de cómo se usan como simular el movimiento de animales, operar agujas de parqueo y transportar objetos. El documento concluye reflexionando sobre los logros y desafíos del proceso de aprendizaje sobre mecanism
Machote de mecanismos
El documento describe 6 mecanismos diferentes compuestos por varios elementos como poleas, ruedas dentadas, tornillos sin fin y cremalleras. Cada mecanismo transforma un movimiento giratorio de entrada en uno circular, lineal alterno o lineal de salida. Se proveen ejemplos de cómo cada mecanismo se aplica en objetos de la vida real como máquinas de coser, sillas eléctricas y taladros. Adicionalmente, se describen 3 mecanismos compuestos y sus aplicaciones en robots exploradores. Finalmente, el autor resume su experiencia constru
Jca construccion de mecanismos robotica educativa
Registro de la construcción de los sistemas mecánicos para robótica educativa, de primer a sexto grado. Se presentan las fotos resultado de la construcción y características generales de los mismos. Al final se incluye un resumen de las experiencias.
Machote de mecanismos milton lobo
una descripción con fotografías de los mecanismos construidos en el curso de Robótica Educativa para la Fundación Omar Dengo. MEP-FOD
Machote de mecanismos
Este documento presenta propuestas de mecanismos para diferentes grados escolares como parte de un curso de robótica educativa. Cada propuesta describe los mecanismos involucrados, los movimientos de entrada y salida, y aplicaciones prácticas de dichos mecanismos. El documento también incluye diagramas ilustrativos de los mecanismos propuestos y un análisis del proceso de construcción del autor.
Machote de mecanismos
Este documento presenta propuestas de mecanismos para diferentes grados escolares como parte de un curso de robótica educativa. Cada propuesta describe los mecanismos involucrados, los movimientos de entrada y salida, y aplicaciones prácticas. El autor también analiza su proceso de construcción de los mecanismos y los desafíos que enfrentó, como la falta de piezas.
Clase26_9
Este documento presenta una clase sobre cómo usar la gravedad para moverse de manera eficiente, particularmente para bailar tango. Explica diferentes tipos de locomoción como caminar y correr, y cómo la gravedad y el rozamiento pueden usarse a favor para superar la inercia durante los cambios de dirección, velocidad y sentido. También describe una "marca dinámica" en tango que aprovecha la gravedad para generar movimiento de manera eficiente. Por último, invita a las clases regulares los domingos a las 19:30 hs en
Construcción Mecanismos Gloriana
El documento describe diferentes mecanismos de máquinas, incluyendo poleas, ruedas dentadas, tornillos sin fin, excéntricas y bielas. Explica los movimientos de entrada y salida de cada mecanismo y da ejemplos de aplicaciones como cajas de música, robots, mezcladoras y más.
Pasos para movimiento caracteristico de un robot
El documento describe dos actividades de programación de un robot NXT. La primera actividad programa al robot para que avance en línea recta durante 10 segundos y luego gire 45° y avance nuevamente. La segunda actividad programa al robot para que avance en línea recta durante 5 segundos, luego gire 360° y avance nuevamente.
Mecanismos de la Propuesta
Este documento presenta propuestas educativas sobre mecanismos para diferentes grados escolares, incluyendo poleas, ruedas dentadas, engranajes y palancas. Cada propuesta describe los mecanismos, sus movimientos de entrada y salida, y ejemplos de su uso en objetos reales. El autor analiza haber logrado construir cada estructura pese a carecer de algunas piezas.
Unidad 2 Curos Rob 2016
Este documento presenta propuestas educativas para diferentes grados escolares sobre mecanismos robóticos. Propone estudiar mecanismos como engranajes, palancas, poleas y cremalleras, y cómo simular su funcionamiento para crear movimientos como de animales, máquinas y más. También incluye aplicaciones de los mecanismos en la vida real y reflexiones sobre logros y desafíos del aprendizaje sobre robótica a través de la construcción de mecanismos.
Test 7
Este documento presenta 10 preguntas sobre conceptos básicos de fuerzas y movimiento como la gravedad, la fricción, las máquinas simples como la polea y la palanca, y la velocidad. La gravedad atrae los objetos hacia la Tierra, la fricción se opone al movimiento, y las máquinas simples pueden cambiar la dirección o magnitud de una fuerza aplicada.
presentacion de maquinas,palancas
Este documento define qué son las máquinas, incluyendo máquinas simples y máquinas compuestas. Explica que las máquinas son conjuntos de piezas que realizan un trabajo determinado y fueron inventadas por el hombre para reducir el esfuerzo. Describe máquinas simples como el plano inclinado y la palanca, la cual puede ser de primer, segundo o tercer grado. Finalmente, atribuye la famosa cita "Dadme un punto de apoyo y moveré el mundo" a Arquímedes para ilustrar la aplicabilidad del concept
Machote de mecanismos michael
Este documento presenta una propuesta educativa de robótica para diferentes grados que involucra el estudio y aplicación de varios mecanismos. Propone el estudio de poleas, engranajes, diferenciales, cigüeñales, sistemas de bandas, cremalleras y más. Explica cómo estas aplican en la vida real en cosas como mascotas, electrodomésticos, maquinaria industrial y juguetes mecánicos. También reflexiona sobre los logros del proceso y desafíos con piezas faltantes.
Machote de mecanismos marisol
Este documento presenta una propuesta educativa sobre mecanismos para diferentes grados de educación primaria. Propone el estudio de mecanismos como engranajes, poleas, cigüeñales, cremalleras, levas y trenes de engranajes, así como sus aplicaciones en la vida real como aspiradoras, carretillas y juegos mecánicos. Incluye fotos y nombres de los mecanismos a estudiar en cada grado.
Actividad n
Este documento describe dos actividades relacionadas con la programación de prototipos electromecánicos. La primera actividad explica cómo programar los prototipos para que realicen funciones específicas como movimientos de robots. La segunda actividad detalla cómo programar un prototipo para que se mueva hacia adelante, se detenga y gire 360 grados. El documento proporciona instrucciones sobre cómo configurar la dirección, duración y grados de rotación para lograr los movimientos deseados.
Actividad n
Este documento describe dos actividades relacionadas con la programación de prototipos electromecánicos. La primera actividad explica cómo programar los prototipos para que realicen funciones específicas como movimientos de robots. La segunda actividad detalla cómo programar un prototipo para que se mueva hacia adelante, se detenga y gire 360 grados. El documento proporciona instrucciones sobre cómo configurar la dirección, duración y grados de rotación para lograr los movimientos deseados.
Semana 2
Este documento presenta propuestas educativas para diferentes grados que involucran el estudio de varios mecanismos y sus aplicaciones. En los grados más bajos se proponen mecanismos simples como poleas, engranajes y excéntricas para simular mascotas. En grados más altos, los mecanismos se hacen más complejos e incluyen trenes de engranajes, diferenciales y palancas, con aplicaciones como robots y máquinas. El documento también incluye fotos y nombres de los mecanismos propuestos.
Maquinas simples
El documento presenta información sobre maquinas simples. Se dividen en tres categorías: palancas, donde se explican tres tipos (palanca de tercer genero, carretilla, y balanza romana); conceptos sobre maquinas simples como la conservación de la energía y ejemplos como el gato de automóvil; y nombres de maquinas cotidianas como ventilador, cuchillo, computador, llaves y licuadora.
Mecanismos Propuesta Educativa I y II ciclos
Este documento presenta propuestas educativas sobre mecanismos robóticos para diferentes grados escolares. Propone el estudio de mecanismos como engranajes, poleas, cremalleras y su aplicación en la construcción de robots con forma de animales u objetos que realicen tareas simples. También incluye el estudio de mecanismos más complejos y su uso para crear robots que ayuden a personas con discapacidad u automaticen procesos industriales.
Más contenido relacionado
La actualidad más candente
Jca construccion de mecanismos robotica educativa
Registro de la construcción de los sistemas mecánicos para robótica educativa, de primer a sexto grado. Se presentan las fotos resultado de la construcción y características generales de los mismos. Al final se incluye un resumen de las experiencias.
Machote de mecanismos milton lobo
una descripción con fotografías de los mecanismos construidos en el curso de Robótica Educativa para la Fundación Omar Dengo. MEP-FOD
Machote de mecanismos
Este documento presenta propuestas de mecanismos para diferentes grados escolares como parte de un curso de robótica educativa. Cada propuesta describe los mecanismos involucrados, los movimientos de entrada y salida, y aplicaciones prácticas de dichos mecanismos. El documento también incluye diagramas ilustrativos de los mecanismos propuestos y un análisis del proceso de construcción del autor.
Machote de mecanismos
Este documento presenta propuestas de mecanismos para diferentes grados escolares como parte de un curso de robótica educativa. Cada propuesta describe los mecanismos involucrados, los movimientos de entrada y salida, y aplicaciones prácticas. El autor también analiza su proceso de construcción de los mecanismos y los desafíos que enfrentó, como la falta de piezas.
Clase26_9
Este documento presenta una clase sobre cómo usar la gravedad para moverse de manera eficiente, particularmente para bailar tango. Explica diferentes tipos de locomoción como caminar y correr, y cómo la gravedad y el rozamiento pueden usarse a favor para superar la inercia durante los cambios de dirección, velocidad y sentido. También describe una "marca dinámica" en tango que aprovecha la gravedad para generar movimiento de manera eficiente. Por último, invita a las clases regulares los domingos a las 19:30 hs en
Construcción Mecanismos Gloriana
El documento describe diferentes mecanismos de máquinas, incluyendo poleas, ruedas dentadas, tornillos sin fin, excéntricas y bielas. Explica los movimientos de entrada y salida de cada mecanismo y da ejemplos de aplicaciones como cajas de música, robots, mezcladoras y más.
Pasos para movimiento caracteristico de un robot
El documento describe dos actividades de programación de un robot NXT. La primera actividad programa al robot para que avance en línea recta durante 10 segundos y luego gire 45° y avance nuevamente. La segunda actividad programa al robot para que avance en línea recta durante 5 segundos, luego gire 360° y avance nuevamente.
Mecanismos de la Propuesta
Este documento presenta propuestas educativas sobre mecanismos para diferentes grados escolares, incluyendo poleas, ruedas dentadas, engranajes y palancas. Cada propuesta describe los mecanismos, sus movimientos de entrada y salida, y ejemplos de su uso en objetos reales. El autor analiza haber logrado construir cada estructura pese a carecer de algunas piezas.
Unidad 2 Curos Rob 2016
Este documento presenta propuestas educativas para diferentes grados escolares sobre mecanismos robóticos. Propone estudiar mecanismos como engranajes, palancas, poleas y cremalleras, y cómo simular su funcionamiento para crear movimientos como de animales, máquinas y más. También incluye aplicaciones de los mecanismos en la vida real y reflexiones sobre logros y desafíos del aprendizaje sobre robótica a través de la construcción de mecanismos.
Test 7
Este documento presenta 10 preguntas sobre conceptos básicos de fuerzas y movimiento como la gravedad, la fricción, las máquinas simples como la polea y la palanca, y la velocidad. La gravedad atrae los objetos hacia la Tierra, la fricción se opone al movimiento, y las máquinas simples pueden cambiar la dirección o magnitud de una fuerza aplicada.
presentacion de maquinas,palancas
Este documento define qué son las máquinas, incluyendo máquinas simples y máquinas compuestas. Explica que las máquinas son conjuntos de piezas que realizan un trabajo determinado y fueron inventadas por el hombre para reducir el esfuerzo. Describe máquinas simples como el plano inclinado y la palanca, la cual puede ser de primer, segundo o tercer grado. Finalmente, atribuye la famosa cita "Dadme un punto de apoyo y moveré el mundo" a Arquímedes para ilustrar la aplicabilidad del concept
Machote de mecanismos michael
Este documento presenta una propuesta educativa de robótica para diferentes grados que involucra el estudio y aplicación de varios mecanismos. Propone el estudio de poleas, engranajes, diferenciales, cigüeñales, sistemas de bandas, cremalleras y más. Explica cómo estas aplican en la vida real en cosas como mascotas, electrodomésticos, maquinaria industrial y juguetes mecánicos. También reflexiona sobre los logros del proceso y desafíos con piezas faltantes.
Machote de mecanismos marisol
Este documento presenta una propuesta educativa sobre mecanismos para diferentes grados de educación primaria. Propone el estudio de mecanismos como engranajes, poleas, cigüeñales, cremalleras, levas y trenes de engranajes, así como sus aplicaciones en la vida real como aspiradoras, carretillas y juegos mecánicos. Incluye fotos y nombres de los mecanismos a estudiar en cada grado.
Actividad n
Este documento describe dos actividades relacionadas con la programación de prototipos electromecánicos. La primera actividad explica cómo programar los prototipos para que realicen funciones específicas como movimientos de robots. La segunda actividad detalla cómo programar un prototipo para que se mueva hacia adelante, se detenga y gire 360 grados. El documento proporciona instrucciones sobre cómo configurar la dirección, duración y grados de rotación para lograr los movimientos deseados.
Actividad n
Este documento describe dos actividades relacionadas con la programación de prototipos electromecánicos. La primera actividad explica cómo programar los prototipos para que realicen funciones específicas como movimientos de robots. La segunda actividad detalla cómo programar un prototipo para que se mueva hacia adelante, se detenga y gire 360 grados. El documento proporciona instrucciones sobre cómo configurar la dirección, duración y grados de rotación para lograr los movimientos deseados.
Semana 2
Este documento presenta propuestas educativas para diferentes grados que involucran el estudio de varios mecanismos y sus aplicaciones. En los grados más bajos se proponen mecanismos simples como poleas, engranajes y excéntricas para simular mascotas. En grados más altos, los mecanismos se hacen más complejos e incluyen trenes de engranajes, diferenciales y palancas, con aplicaciones como robots y máquinas. El documento también incluye fotos y nombres de los mecanismos propuestos.
Maquinas simples
El documento presenta información sobre maquinas simples. Se dividen en tres categorías: palancas, donde se explican tres tipos (palanca de tercer genero, carretilla, y balanza romana); conceptos sobre maquinas simples como la conservación de la energía y ejemplos como el gato de automóvil; y nombres de maquinas cotidianas como ventilador, cuchillo, computador, llaves y licuadora.
Mecanismos Propuesta Educativa I y II ciclos
Este documento presenta propuestas educativas sobre mecanismos robóticos para diferentes grados escolares. Propone el estudio de mecanismos como engranajes, poleas, cremalleras y su aplicación en la construcción de robots con forma de animales u objetos que realicen tareas simples. También incluye el estudio de mecanismos más complejos y su uso para crear robots que ayuden a personas con discapacidad u automaticen procesos industriales.
La actualidad más candente (18)
Destacado
Redes de informacion
Este documento resume los diferentes tipos de redes de información como LAN, WAN e intranet. Describe las características de las redes LAN como su alcance limitado y altas velocidades de transmisión. También cubre los conceptos básicos de transferencia de datos como descarga, subida, tasas de transferencia y unidades de medida. Finalmente, presenta los diferentes servicios de conexión a Internet como Dial-up y banda ancha.
Tarea4
La televisión por internet permite ver programas de televisión a través de streaming desde un ordenador conectado a internet. Se puede acceder a contenidos de televisión interactivos desde páginas web como justin.tv o mediante aplicaciones como JLC's Internet TV que ofrecen canales de televisión en vivo.
Destacado (7)
Más de juanguaman99
Etiquetas
El documento explica que existen dos tipos de etiquetas en HTML: etiquetas de comienzo de elemento que delimitan el inicio de un elemento como <html> y etiquetas de cierre como </html> que delimitan el fin de un elemento. Algunos ejemplos de etiquetas mencionadas son <html>, </html>, <head> y <title>.
Introduccion html
El documento explica brevemente qué es HTML. HTML es el lenguaje usado para escribir páginas web y está compuesto de etiquetas que delimitan los diferentes elementos multimedia de un documento como texto, imágenes y videos. El documento también describe las dos etiquetas principales en HTML - las etiquetas de inicio y fin - y provee algunos ejemplos básicos. Finalmente, brinda una breve descripción del Bloc de Notas de Windows.
Relaciones
El documento es sobre dos estudiantes, Juan Sebastián Barrantes Guamán y Brayan Baron Callejas, que asisten al Colegio Nacional Nicolás Esguerra en el curso 902.
Crear base de datos
La instrucción describe los pasos básicos para crear una base de datos en Microsoft Access 2010, incluyendo hacer clic en "Vista de Diseño" y asignar un nombre a la tabla.
Texti estilo03
El documento contiene información sobre Tejiestilo S.A., una empresa dedicada a la fabricación de lienzos para artistas. Incluye tablas de empleados, clientes y servicios de la compañía.
Diamonds textiles
El documento contiene información sobre Diamonds Textiles, incluyendo su dirección, NIT y números de contacto. También lista tablas de clientes, productos y proveedores.
Colegio nacional nicolas esguerra
El documento presenta la lista de integrantes de un colegio y describe la trayectoria que debe seguir un robot entre los puntos E, A, B, C, D y E, incluyendo giros de 90° en los puntos B, C y D, y un giro de 45° en el punto E para dirigirse diagonalmente al punto C. Adicionalmente, especifica las potencias y tiempos requeridos para los movimientos.
Chacon pte
Este documento describe cómo crear un programa simple en el NXT que haga que un robot avance y retroceda cuando se presione un sensor táctil, y proporciona instrucciones sobre cómo conectar los sensores y motores correctamente. También explica cómo usar las funciones de registro de datos y Bluetooth del NXT.
Excel#1
El documento describe las funciones básicas de Microsoft Excel como tablas de multiplicar, incluyendo filas, columnas y celdas; combinar y centrar texto; fórmulas; anclar datos; series de datos; manejo de colores; y bordes.
Crucigrama
The editorial argues that revisions are needed to improve the US immigration system. It criticizes some current policies and administration of the system, and calls for changes to make the system more fair and just.
Tres d
El documento contiene los nombres y códigos de dos estudiantes del Colegio Nacional Nicolás Esguerra. Barrantes Guaman Juan Sebastian tiene el código 38 y Ceferino Delgado Michael Ceferino no tiene código asignado.
Laberint oinf.
El documento contiene los nombres y códigos de dos estudiantes del Colegio Nacional Nicolás Esguerra. Barrantes Guaman Juan Sebastian tiene el código 38 y Ceferino Delgado Michael Ceferino no tiene código asignado.
3ds max 6 #2
El documento describe los pasos básicos para crear un modelo 3D de un personaje en Estudio MAX, incluyendo cómo crear un cubo, esferas para la cabeza y ojos, y agregar detalles como pupilas.
3ds max 6 #1
Este documento proporciona una introducción a 3ds Max, incluyendo cómo crear escenas, modelar objetos, usar materiales y visualizar escenas. Explica que 3ds Max permite crear modelos 3D, imágenes y animaciones, y cubre temas como establecer unidades, categorías de objetos, propiedades básicas y mapas de materiales.
Andres lopez
Este documento proporciona información sobre el programa 3D Max. Explica cómo establecer unidades de medida, modelar objetos, usar materiales y visualizar escenas. Detalla los pasos para seleccionar unidades, crear objetos mediante categorías en el panel Crear, diseñar materiales usando mapas que controlan propiedades de superficie, y verificar los materiales al renderizar una escena.
Andres lopez
Este documento proporciona información sobre el programa 3D Max. Explica cómo establecer unidades de medida, modelar objetos, usar materiales y visualizar escenas. Detalla los pasos para seleccionar unidades, crear objetos mediante categorías en el panel Crear, diseñar materiales usando mapas que controlan propiedades de superficie, y verificar el efecto de los materiales al renderizar una escena.
Bloques de programación
Este documento describe los diferentes tipos de bloques de programación disponibles en Scratch y sus funciones. Los bloques se dividen en las categorías de Movimiento, Apariencia, Control, Sensores, Sonido, Operadores, Lápiz y Variables. Cada categoría controla una función como el movimiento del objeto, su apariencia, la entrada del usuario y más.
Maloka
Maloka es un centro interactivo en el cual se aprenden conceptos básicos de ciencia y tecnología a través de diversas salas, incluyendo la energía, el espacio, la vida de los astronautas, la prehistoria y el universo.
Ejercicios pasa a paso corel draw x5
El documento presenta instrucciones paso a paso para realizar diferentes tareas en CorelDraw X5 como abrir, guardar y cerrar documentos, crear objetos, copiar, duplicar objetos y aplicar diferentes tipos de relleno como uniforme, con armonía de colores y degradado de dos colores. El estudiante Juan Sebastián Barrantes del Colegio Nacional Nicolás Esguerra en el curso 802 comparte estas guías en su blog Tatánbarrantes.blogspot.com.
Más de juanguaman99 (20)
Colegio nacional nicolas esguerra
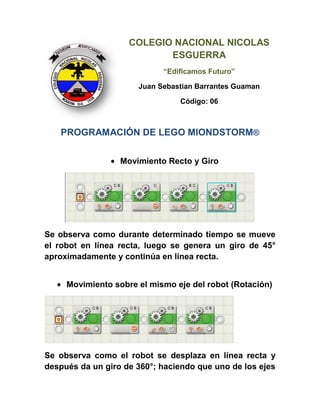
- 1. COLEGIO NACIONAL NICOLAS ESGUERRA “Edificamos Futuro” Juan Sebastian Barrantes Guaman Código: 06 PROGRAMACIÓN DE LEGO MIONDSTORM® Movimiento Recto y Giro Se observa como durante determinado tiempo se mueve el robot en línea recta, luego se genera un giro de 45° aproximadamente y continúa en línea recta. Movimiento sobre el mismo eje del robot (Rotación) Se observa como el robot se desplaza en línea recta y después da un giro de 360°; haciendo que uno de los ejes
- 2. rote por completo en 180°, por último el robot continua en línea recta. Movimiento de Ondas Se observa como el robot sigue un movimiento ondulatorio en forma zic-zac programado para que se mueva un poco a la izquierda, luego en línea recta, luego a la derecha, y en línea recta…Así repetidas veces. Movimiento de 360° El robot se mueve en línea recta, luego gira hacia cualquiera de los 2 lados (B o C), luego continua en línea recta