Descargado 10 veces
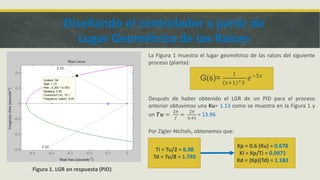
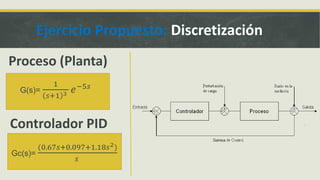
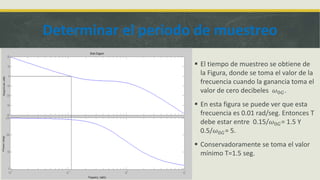
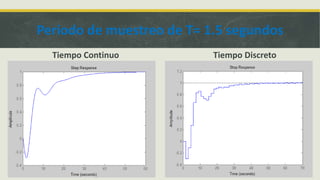
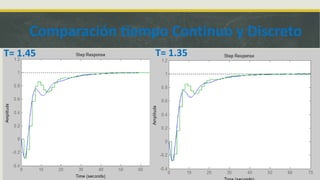

El documento detalla el diseño de un controlador PID utilizando el lugar geométrico de las raíces, incluyendo cálculos específicos de ganancias y tiempos de muestreo. Se establece un periodo de muestreo mínimo de 1.5 segundos y se discute la importancia de mantener un tiempo de muestreo cercano a cero para que la respuesta del sistema en tiempo discreto asemeje al continuo. El ejercicio también fomenta el aprendizaje de comandos en MATLAB y la resolución de un controlador PID.





















































