Control Discreto
•
2 recomendaciones•3,716 vistas

Este documento introduce el control digital y compara su funcionamiento con el control analógico. Explica que los computadores digitales permitieron implementar sistemas de control más complejos de manera más económica. Describe el proceso de muestreo y cuantización necesario para usar un controlador digital en un proceso físico continuo. Finalmente, presenta un ejemplo numérico para ilustrar el diseño de un controlador digital.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Control Discreto
Similar a Control Discreto (20)
Más de Jaime Martínez Verdú
Más de Jaime Martínez Verdú (20)
Control Discreto
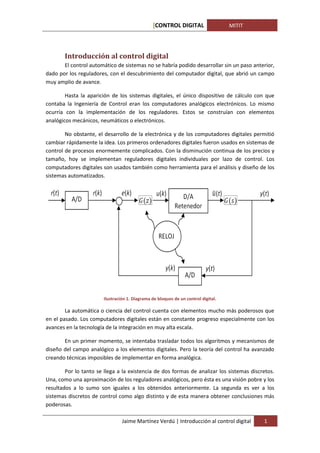
- 1. [CONTROL DIGITAL MITIT Introducción al control digital El control automático de sistemas no se habría podido desarrollar sin un paso anterior, dado por los reguladores, con el descubrimiento del computador digital, que abrió un campo muy amplio de avance. Hasta la aparición de los sistemas digitales, el único dispositivo de cálculo con que contaba la Ingeniería de Control eran los computadores analógicos electrónicos. Lo mismo ocurría con la implementación de los reguladores. Estos se construían con elementos analógicos mecánicos, neumáticos o electrónicos. No obstante, el desarrollo de la electrónica y de los computadores digitales permitió cambiar rápidamente la idea. Los primeros ordenadores digitales fueron usados en sistemas de control de procesos enormemente complicados. Con la disminución continua de los precios y tamaño, hoy se implementan reguladores digitales individuales por lazo de control. Los computadores digitales son usados también como herramienta para el análisis y diseño de los sistemas automatizados. Ilustración 1. Diagrama de bloques de un control digital. La automática o ciencia del control cuenta con elementos mucho más poderosos que en el pasado. Los computadores digitales están en constante progreso especialmente con los avances en la tecnología de la integración en muy alta escala. En un primer momento, se intentaba trasladar todos los algoritmos y mecanismos de diseño del campo analógico a los elementos digitales. Pero la teoría del control ha avanzado creando técnicas imposibles de implementar en forma analógica. Por lo tanto se llega a la existencia de dos formas de analizar los sistemas discretos. Una, como una aproximación de los reguladores analógicos, pero ésta es una visión pobre y los resultados a lo sumo son iguales a los obtenidos anteriormente. La segunda es ver a los sistemas discretos de control como algo distinto y de esta manera obtener conclusiones más poderosas. Jaime Martínez Verdú | Introducción al control digital 1
- 2. [CONTROL DIGITAL MITIT Un sistema discreto se implanta en el lazo de control a fin de sustituir el regulador pero el proceso físico continúa teniendo un carácter continuo en la mayoría de los casos de interés. La señal de salida se muestrea cada cierto tiempo (llamado período de muestreo T) y se discretiza mediante un conversor analógico digital A/D. Esta información es procesada y convertida nuevamente a analógica mediante un conversor digital analógico. Por lo tanto, internamente, el computador se independiza del tipo de señal con que está trabajando y trata todas las magnitudes como una serie de valores discretos (de precisión finita). Por esto resulta cómodo trabajar con ecuaciones en diferencia en lugar de ecuaciones diferenciales como se hacía con los métodos analógicos. Características del Control Digital Como características básicas del control digital se pueden mencionar las siguientes: 1. No existe límite en la complejidad del algoritmo. Cosa que sí sucedía inicialmente en los sistemas analógicos. 2. Facilidad de ajuste y transformación. Por el motivo primero, un cambio en un control analógico implica, en el mejor de los casos, un cambio de componentes si no un cambio del controlador completo. 3. Exactitud y estabilidad en el cálculo. Debido a que no existen desvíos u otras fuentes de error. 4. Uso del computador con otros fines (alarmas, archivo de datos, administración, etc.) 5. Costo - número de lazos. No siempre se justifica un control digital ya que existe un costo mínimo que lo hace inaplicable para un número reducido de variables. En cuanto a la arquitectura de un lazo de control es de la forma en que lo muestra la Ilustración 1. El proceso en la mayoría de los casos es continuo, es decir, se debe excitar el mismo con una señal continua y entonces éste genera una salida continua. Esta señal, como en cualquier lazo de control es monitorizada por un dispositivo que a su vez entrega una señal continua proporcional a la magnitud medida. Por otra parte, se dispone de un computador que sólo es capaz de operar con valores discretos. Para compatibilizar ambos existen dos elementos: el D/A y el A/D que realizan la conversión de magnitudes. Para aplicar un control discreto hemos de actuar del siguiente modo: 1. Definir el periodo de nuestro T. Elegir el periodo de nuestro periodo de muestreo T. La más usada que corresponde al ancho de banda del sistema en bucle cerrado. La frecuencia es tal que su la magnitud que aparece en su diagrama de Bode es de Se selecciona el Tpráctico ya que 2.1 Se diseña un controlador continuo y se discretiza. Puede pasar de estable a inestable. 2.2 Se discretiza y se aplican técnicas en discreto. Jaime Martínez Verdú | Introducción al control digital 2
- 3. [CONTROL DIGITAL MITIT D/A A/D T Ilustración 2. Diagrama de bloques de una planta empleando un control digital. Sólo sabemos lo que pasa en los intervalos de muestreo. Ilustración 3. Señal continua y digitalizada durante el control. Jaime Martínez Verdú | Introducción al control digital 3
- 4. [CONTROL DIGITAL MITIT EJERCICIO Disponemos de una planta con la siguiente función de transferencia: Ecuación 1 Con un periodo de muestreo de . Para discretizar el sistema, el código empleado ha sido el siguiente: sist_c=tf([1],[1 10 20]); sist_d=c2d(sist_c,0.001,'zoh'); sisotool; Se ha empleado la función C2d(sist_c, T, ‘zoh’) que nos permite obtener la función discretizada de la planta empleando un retenedor de orden cero. Los resultados obtenidos se muestran a continuación: Transfer function: 1 --------------- s^2 + 10 s + 20 Transfer function: 4.983e-007 z + 4.967e-007 ------------------------- z^2 - 1.99 z + 0.99 Sampling time: 0.001 Step Response 1.4 1.2 1 0.8 Amplitude 0.6 0.4 0.2 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time (sec) Ilustración 4. Respuesta ante escalón del sistema con MP = 30 %, ts = 0,56 s y ep = 10%. Jaime Martínez Verdú | Introducción al control digital 4
- 5. [CONTROL DIGITAL MITIT Root Locus Editor for Open Loop 1 (OL1) 2 1.5 1 0.5 Imag Axis 0 -0.5 -1 -1.5 -2 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 Real Axis Ilustración 5. Lugar geométrico de las raíces del sistema con MP = 30%, ts = 0,56s y ep = 10%. Root Locus Editor for Open Loop 1 (OL1) 0.15 0.1 0.05 Imag Axis 0 -0.05 -0.1 -0.15 0.96 0.97 0.98 0.99 1 1.01 1.02 1.03 Real Axis Ilustración 6. Detalle lugar geométrico de las raíces MP = 30%, ts = 0,56s y ep = 10%. Jaime Martínez Verdú | Introducción al control digital 5
- 6. [CONTROL DIGITAL MITIT EJERCICIO Disponemos de una planta discretizada con la siguiente función de transferencia: Ecuación 2 Repetiremos el procedimiento: SIST_D=tf([1],[1 -0.3 0.5],1/20) sisotool(SIST_D) Imag Axis -2.5 -1.5 -0.5 0.5 1.5 2.5 -2 -1 0 1 2 -0.8 -0.6 -0.4-1 Root Locus Editor for Open Loop 1 (OL1) -0.2 Real Axis 00.2 0.4 0.6 0.8 1 Ilustración 7. Lugar geométrico de las raíces del sistema con MP = -, ts = - y ep = 80%. Step Response 0.5 0.45 0.4 0.35 0.3 Amplitude 0.25 0.2 0.15 0.1 0.05 0 0 0.5 1 1.5 2 2.5 3 3.5 4 Time (sec) Ilustración 8. Respuesta ante entrada escalón del sistema con MP = -, ts = - y ep = 80%. Jaime Martínez Verdú | Introducción al control digital 6
- 7. [CONTROL DIGITAL MITIT Puesto que el sistema presenta unas malas especificaciones, procederemos a su control mediante un controlador PID discreto: Ecuación 3 Aplicaremos la Transformación bilineal: Ecuación 4 Tendremos lo siguiente: ; ; El código empleado es: PID_C=tf([10 100 200],[1 0]) PID_D=c2d(PID_C,0.12,'tustin') SIST _D Step LT I System Scope SIST _D LT I System2 Scope1 0.5 SIST _D Gain LT I System3 Scope3 SIST _D LT I System1 Scope2 LT I System4 PID_D Ilustración 9. Ilustración de un control mediante un PID discreto. Jaime Martínez Verdú | Introducción al control digital 7
- 8. [CONTROL DIGITAL MITIT Ilustración 10. Respuesta inestable del sistema con PID discreto. Se puede observar la dificultad y los problemas que acarrea la utilización de un PID discreto para este caso. Se puede usar PID_c pero luego hay que retocar. Por ello, se decide emplear sisotool y proceder a introducir un par de polos y ceros: Polos en -1 y +1 Ceros en -0.5 y +0.5 Para un compensador con una ganancia de 0.10137 el sistema cumple las especificaciones: Ts<2s Mp<5% ep<1% Root Locus Editor for Open Loop 1 (OL1) 2 1.5 1 0.5 Imag Axis 0 -0.5 -1 -1.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 Real Axis Ilustración 11. Lugar geométrico de las raíces del sistema con MP = -, ts = 1,78 s y ep = 0%. Jaime Martínez Verdú | Introducción al control digital 8
- 9. [CONTROL DIGITAL MITIT 1 System: Closed Loop r to y I/O: r to y Settling Time (sec): 1.78 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 0.5 1 1.5 2 2.5 3 3.5 Ilustración 12. Respuesta ante entrada escalón del sistema con MP = -, ts = 1,78 s y ep = 0%. Jaime Martínez Verdú | Introducción al control digital 9
- 10. [CONTROL DIGITAL MITIT EJERCICIO Disponemos de una planta discretizada con la siguiente función de transferencia: Ecuación 5 Con un periodo de muestreo de T = 0,1s. Se trata de un ejercicio de controladores básico donde la expresión del controlador PID es: Ecuación 6 Se desean unas especificaciones como las siguientes: Ts < 1,75 s Mp < 15 % ep = 0 Para controlar el sistema, empezaremos por implementar el siguiente código: NUM_D=0.007*[1,0,94] NUM_D=0.007*[1 0.94] DEN_D=conv([1 -0.86],[1 -0.95]) SIST_D=tf(NUM_D,DEN_D,0.1) sisotool(SIST_D) Mediante la utilización del esquema en Simulink antes ilustrado, encontramos que el sistema es muy lento por lo que no se cumplen las especificaciones requeridas. <Intentamos mejorar el comportamiento del sistema cerrando el lazo de control y siguen sin cumplirse las especificaciones. Procederemos a calcular un regulador PID basándonos en la ecuación anterior. Introducimos las especificaciones para ver más o menos y probamos Kp habiendo colocado los polos y ceros de modo que los ceros se obtengan del siguiente modo: 1. Buscamos z-a y z-b. 2. Colocamos un polo en el origen y obtenemos la parte real de un cero , por ejemplo a: Ecuación 7 3. El valor del cero correspondiente al integrador b la buscamos. a. Colocamos un polo en 0. b. Colocamos otro polo en -1. c. Colocamos un cero en 0,95. d. Buscamos el último cero de modo que consigamos las especificaciones. Ecuación 8 Jaime Martínez Verdú | Introducción al control digital 10
- 11. [CONTROL DIGITAL MITIT Root Locus Editor for Open Loop 1 (OL1) 1.5 1 0.5 Imag Axis 0 -0.5 -1 -1.5 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 Real Axis Ilustración 13. Lugar geométrico de las raíces del sistema con MP = 0 %, ts = 1,5 s y ep = 0 %. Root Locus Editor for Open Loop 1 (OL1) 1 0.5 Imag Axis 0 -0.5 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Real Axis Ilustración 14. Detalle del lugar geométrico de las raíces con MP = 0 %, ts = 1,5 s y ep = 0 %. Jaime Martínez Verdú | Introducción al control digital 11
- 12. [CONTROL DIGITAL MITIT Step Response 1 0.9 0.8 0.7 0.6 Amplitude 0.5 0.4 0.3 0.2 0.1 0 0 1 2 3 4 5 6 Time (sec) Ilustración 15. Respuesta ante entrada escalón del sistema con MP = 0 %, ts = 1,5 s y ep = 0 %. Referencias 1. Åström, Karl J.: Computer Controlled Systems. Theory and Design, Prentice Hall –1984 2. Aracil Santonja, R.: Sistemas Discretos de Control, Universidad Polit. de Madrid– 1980 3. Isermann, R.: Digital Control Systems, Springer Verlag – 1981 4. Papoulis, A: Sistemas Digitales y Analógicos, Marcombo – 1978 5. Kuo, B: Discrete Data Control Systems, Prentice Hall – 1970 6. Tou, : Digital and Sampled Data Control Systems, Mac Graw Hill – 1959 7. Proakis, J.G. & Manolakis, D.G.: Tratamiento Digital de Señales: Principios, 8. Algoritmos y Aplicaciones, Traducción de Digital Signal Processing: Principles, Algorithms and Applications, 3rd. edition, Prentice Hall, Englewood Cliffs, UK., 1998. Jaime Martínez Verdú | Referencias 12
- 13. [CONTROL DIGITAL MITIT Tabla de contenidos Introducción al control digital ....................................................................................................... 1 Características del Control Digital ................................................................................ 2 EJERCICIO.................................................................................................................. 4 EJERCICIO.................................................................................................................. 6 EJERCICIO................................................................................................................ 10 Referencias .................................................................................................................................. 12 Tabla de contenidos .................................................................................................................... 13 Tabla de ilustraciones Ilustración 1. Diagrama de bloques de un control digital. ............................................................ 1 Ilustración 2. Diagrama de bloques de una planta empleando un control digital. ....................... 3 Ilustración 3. Señal continua y digitalizada durante el control. .................................................... 3 Ilustración 4. Respuesta ante escalón del sistema con MP = 30 %, ts = 0,56 s y ep = 10%............. 4 Ilustración 5. Lugar geométrico de las raíces del sistema con MP = 30%, ts = 0,56s y ep = 10%. .. 5 Ilustración 6. Detalle lugar geométrico de las raíces MP = 30%, ts = 0,56s y ep = 10%. ................. 5 Ilustración 7. Lugar geométrico de las raíces del sistema con MP = -, ts = - y ep = 80%. ............... 6 Ilustración 8. Respuesta ante entrada escalón del sistema con MP = -, ts = - y ep = 80%. ............. 6 Ilustración 9. Ilustración de un control mediante un PID discreto. .............................................. 7 Ilustración 10. Respuesta inestable del sistema con PID discreto. ............................................... 8 Ilustración 11. Lugar geométrico de las raíces del sistema con MP = -, ts = 1,78 s y ep = 0%. ....... 8 Ilustración 12. Respuesta ante entrada escalón del sistema con MP = -, ts = 1,78 s y ep = 0%...... 9 Ilustración 13. Lugar geométrico de las raíces del sistema con MP = 0 %, ts = 1,5 s y ep = 0 %. .. 11 Ilustración 14. Detalle del lugar geométrico de las raíces con MP = 0 %, ts = 1,5 s y ep = 0 %..... 11 Ilustración 15. Respuesta ante entrada escalón del sistema con MP = 0 %, ts = 1,5 s y ep = 0 %. 12 Tabla de ecuaciones Ecuación 1 ............................................................................. 4 Ecuación 2 ........................................................................... 6 Ecuación 3 ........................................................................ 7 Ecuación 4 ...................................................................................... 7 Ecuación 5............................................ 10 Ecuación 6 .................................................. 10 Ecuación 7 .................................................................................... 10 Ecuación 7 .............................................. 10 Jaime Martínez Verdú | Tabla de contenidos 13