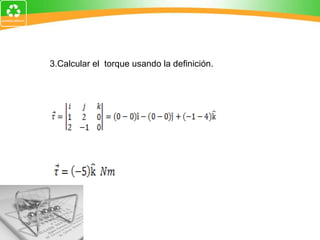
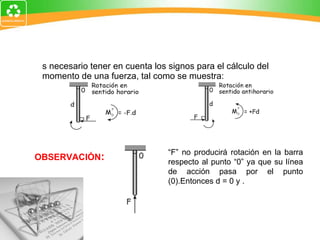
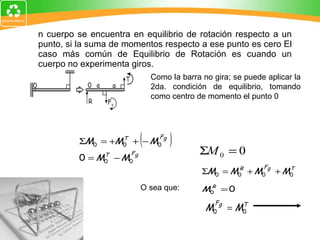
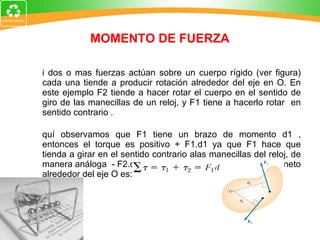
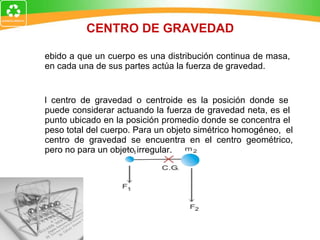
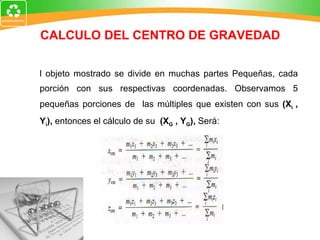
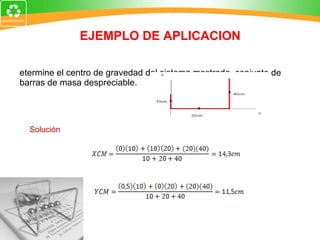
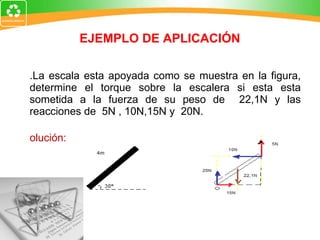
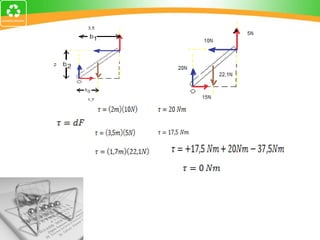
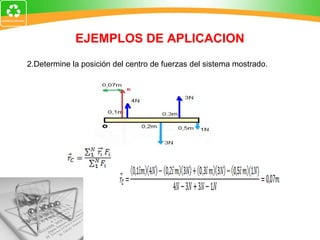
El documento resume conceptos fundamentales de la estática, incluyendo el momento de fuerza, equilibrio rotacional, centro de gravedad, teorema de Varignon, composición de fuerzas paralelas y cupla. Proporciona definiciones, fórmulas y ejemplos para ilustrar estos conceptos clave de la mecánica estática.