Descargar para leer sin conexión




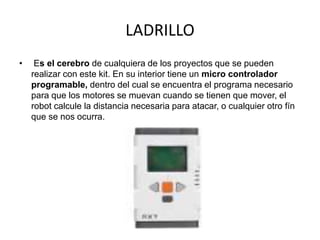
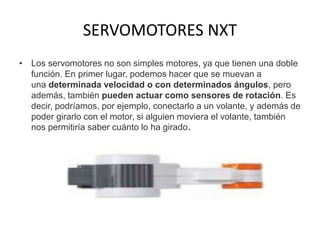










El documento describe la historia y componentes del sistema robótico educativo LEGO Mindstorms NXT/EV3. Explica que Mindstorms fue creado para enseñar ciencia, tecnología, ingeniería y matemáticas a través de la construcción y programación de robots. Detalla los componentes clave como el ladrillo inteligente, motores, y varios sensores como de sonido, distancia y color.





















































































