Mecanica agullo-2
•
0 recomendaciones•330 vistas

Este documento presenta el Teorema de la Cantidad de Movimiento. Establece que la velocidad de cambio de la cantidad de movimiento de un sistema es igual a la resultante de las fuerzas externas que actúan sobre el sistema. Se demuestra que la cantidad de movimiento de un sistema es equivalente a concentrar toda su masa en su centro de inercia. Por lo tanto, el centro de inercia de un sistema se mueve como si fuese una partícula sobre la que actúan las fuerzas externas.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Mecanica agullo-2
Similar a Mecanica agullo-2 (20)
Último
Mecanica agullo-2
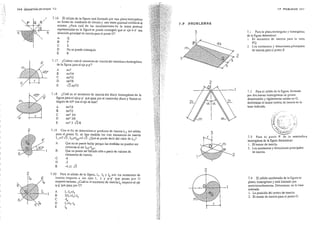
- 1. 226 GEOMETAiÁDEMASAS 7.C p' 7.16 El sólido de la figura está formado por Una placa homogénea en forma de cuadrante de cIrculo y una masa puntual solidaria al mismo. ¿Para cuál de bs localizaciones de la masa puntual representadas en la figura se puede conseguir que el eje h-h' Sea dirección principal de inercia para el punto O? A Q B P e s D No se puede conseguir. E R 7.17 ¿Cuánto vale el momento de inercia del semidiscohomogéneo de la figura para el eje p-p'7 A O1r2 B nu·2/4 e O1r2/2 D mr2/8 E ,12rnr212 7.18 ¿Cuál es el momento de inercia del disco homogéneo de la figura para el eje p-p' que pasa por el centro del disco y forma un ángulo de 45° con el eje de éste? A mr2/4 B mr2/2 e mr' 3/4 D mr2 3/8 E mr' 3 -ti/s 7.19 Con el fin de determinar el producto de inercial12 del sólido para elyunto 0, se han medido los tres momentos de inercia 111 =7"';3, 122=Ipp.:;:5 ·,.,13. ¿Qué se puede decir del valor de 112? A B Que no se puede hallar porque las medidas no pueden ser conectas al ser In=Ipp" Que no puede ser hallado sólo a partir de valores de momentos de inercia. e -6 D -3 E -4,11 .J3 7.20 Para el sólido de la figura, 11, 12 Y Ip son los momentos de inercia respecto a los ejes 1, 2 Y p-p' que pasan por ° respectivamente. ¿Cuál es el momento de inercia Iq respecto al eje q-q' que pasa por 07 A 11-12+13 B 2(1,+12)-1, e -1, D II+Iz-Ip E 1, 7.P PROBLEMAS 3 2 3 7.P PROBLEMAS 227 7.1 Para la placa rectangular y homogénea de la figura determinar: l. El momento de inercio. para la recta PQ. 1. Los momentos y direcciones principales de inercia para el punto P. 7.2 Para el sólido de la figura, fonuado por dos barras homogéneas de grosor despreciable y rígidamente unidas en O, determinar el tensor central de inercia en la base indicada. r' .":. ,.. ' i .•,:;c·,';,' -'iI.'l ' .c' ~ (f~'::. ..::;,', " <;,j' ....~..:.;.:. ~; ..y.' ,:-,.l <-(A DO',,:,> 7.3 Para el punto P de la semiesfera homogénea de la figura determinar: l. El tensor de inercia. 2. Los momentos y direcciones principales de inercia. 7.4 El sólido sombreado de la figura es plano, homogéneo y está limitado por semicircunferencias. Detem1.Ínar, en la bo.se indicada: l. La posición del centro de inercia. 2. El tensor de inercia para el punto O.
- 2. 228 GEOMETRJADEMASAS 7.P R 7,5 Para la cáscara tórica y homogénea de la figura, determinar los momentos de inercia respecto a Jos ejes 1 y 2 (una superficie tórica es la generada por la rotación de una circunferencia alrededor de un eje contenido en su plano y que no la corta: R~r). 7.6 Para el toro macizo y homogéneo de la figura, determinar los momentos de inercia respecto a los ejes 1 y 2 (un toro está generado por la rotación de un disco alrededor de un eje contenido en su plano y que no lo corta: RL.r). 7.7 El sólido homogéneo de la figura es un anillo cilíndrico de radio exterior3r, radio interior r y altura 2r. Delenninar: l. Los momentos de inercia del sólido para los ejes 1 y 2 que pasan por su centro de inercia G. 2. El momento de inercia del sólido respecto al eje e-e' que pasa por el punto P y forma un ángulo de 45° con las direcciones de los ejes 1y 2? 7.8 Con la ayuda de un planímetro integrndorse han determinado los valores de los momentos de inercia según las direcciones 1, 2 Y e-e' que pasan por el punto Q del sólido plano y homogéneo de masa m de la figura: 1¡¡(Q)=6 10-3 kgm', 122(Q)=8 10-3 kgm', Iee,(Q)=lO lO-3 kgm2. La masa del sólido es m=l kg y a=0,02 m. Detelminar: l. El valor del producto de inercia I 12 en Q, en kgm2, 2. Las direcciones principales de inercia·en Q. 3. ¿Cuál es el vatordelmomentode inercia 1ss' según la dirección s-s' que pasa por P, en kgm2 2r p 2r 3 2 3 2r 4r 7.P PROBLEMAS 229 7.9 El sólido de la figura está formado por la barra homogénea de masa m unida perpendicularmente en Q con el disco agujereado que es homogéneo y que sin el agujero tendría también una masa m. Los grosores son despreciables. Detenninar, en la base indicada, l. El vector QG que sitúa el centro de inercia. 2. El tensor de inercia en Q. 3. El tensor de inercia en P. 7.10 El sólido de la figura está formado por un semidisco y una placa en forma de triángulo rectángulo. Ambos son homogéneos, de grosor despreciable y de masa m/2. Determinar en la base indicada: J. El tensor de inercia en P. 2. El tensor central de inercia. 3. Las direcciones centrales de inercia, 7.11 El sólido rígido de la figura está formado por una placa cuadrada y una cáscara semicilíndrica cuyo eje es normal a la p!;:¡ca y pasa por su centro. Ambas son homogéneas. La masa de la placa cuadrada es de 30 kg, la de la cáscara sem.icilíndrica de 24 kg y r=0,5 m. Determinar en la base indicada: 1, El vector QG que posiciona el centro de inercia. 2, El tensor de inercia en el punto O. 3. El momento de inercia para el eje p~p' contenido en el plano 1-3, que pasa por el punto O y forma un ángulo de 30° con el eje 1. 7,12 El sólido de la figura estlS fonuado por una cáscara semiesférica de masa m y una placa cuadrada, con un aglDero circular, de musa (4-n)m. Ambas son homogéneas. Determinar en la base indicada: l. El vector OC que sitúa el centro de inercia. 2, El tensor de inercia en el punto O. 3. El tensor de inercia en el punto P.
- 3. 1, 1 ;:. CAPiTULO 8 TEOREMAS VECTORIALES Los teoremas vectoriales se aplican globalmente a un sistema ~en este texto a un sistema de materia constllnte- y evalúan la velocidad de cambio de una magnitud vectorial asociada a todo el sistema -la cantidad de movimiento y el mOlllento cinético en los teOremas respectivos- en función de las fuerzas y de sus momentos, Ya que evalúan una velocidad de cambio, su integración temporal evalua el cambio finito de la magnitud vectorial correspondiente en función de la integración en el tiempo de las fuerzas o de Sus momentos, según proceda. En el capítulo 9 se pre::;enta el teorema de la energía que completa los teoremas generales de la mecánica introduciendo la integración en el espacio. Una propiedad notable de los teoremas vectoriales es que, en lo que se refiere a las fuerLas, en su formulación sólo intervienen las exteriores, las fuerzas interiores no participan directamente. Además el sistema de fuerzas exteriores interviene mediante la descripción simpliticada dada por su torsor. En el Teorema de la Cantidad de Movimiento, la velocidad de cambio de la cantidad de movimiento suele expresarse como producto de la maSa del sistema por la aceleración del centro de inercia, con lo cual la ecuación del teOrema constituye una generalización de la ecuación de la dinámica de la partícula aplicable a los sistemas. En el Teorema del Momento Cinético, la necesidad de escoger un punto de aplicación hace conveniente establecer, además de la formulación básica para un punto fijo, las versiones para un punto móvil arbitrario y para el centro de inercia. Para un sistema formado por N sólidos, la aplicación de los teoremas vectoriales a cada uno de los sólidos -o él un conjunto de N sistemas independientes formados por sólidos del sistema- conduce a un número de ecuaciones independientes suficiente para determinar todas las ecuaciones del movimiento del sistema y todos los torsOres globales de enl8.ce -o un número de incógnitas de enlace igual al número de componentes independientes de los torsores globales-o Los teoremas vectoriales constituyen pues un método general para el estudio de la dinámica de un sistema. En los sistemas mullisólido, los conceptos de geometría de masas centro de inercia y tensor de il1ercia (capítulo 7) permiten el cálculo global de la contribución de cada sólido en la cantidad de movimiento y el momento cinético del sistema sin tener que hacer integraciones específicas extendidas a los diferenGÍules de masa de cada sólido. 231
- 4. 232 TEOREMAS VECTORIALES 8.1 8.1 TEOREMA DE LA CANTIDAD DE MOVIMIENTO RGal sistema de materia ete • e l---r -fuerzas exteriores ~uerzas interiores Flg. 8.1.1 Para un sistema de materia constante. Fig. 8.1.1, el Teorema de la Cantidad de Movimiento establece, en su versión más genuina, que la velocidad de cambio en tina referencia galileana del vector cantidad de movimiento del sistema, DR.Gnl (sistema), en aquella referencia es igual a la resultante de [as fuerzas de interacción exteriores que actúan sobre las partículas del sistema, ~D Rú' (Sist)] = I,F,,, (P), (1) dt R.G~l sis¡ con: D R (sis!)" I, mI' vR (P). (2) sist La cantidad de movimiento del sistema en una referencia R es la resultante de los vectores cantidad de movimiento l1"lpvR(P) de las partículas del sistema en aquella referencia. .;.Demostración. Para cada partícula P del sistema la ecuación de la dinámica establece, m p3 R.Gnl (P)::::: I Fínt (P) +I Fe;-;1 (P). (3) p p La sUllla de las ecuaciones (3) pe/m todas las partículas del sistema conduce a I m p3 R.Gul (P)::::: .IFe.~t (P). (4) SiSl ,¡51 En el miembro de la derecha no intervienen las fuerzas interiores porque de acuerdo con el pr¡m:;pio de lu acción y la reacción LsislFinl(P):::::O, al incluir esta suma exclusivamente parejas acción-reacción que son de resultante nula (Ecs. 5.4.5). El miembro de la izquierda puede expresarse de la forma, :¿lll p3'CG,'(P)= :tI,InpYRcGP'(P)] "~DRcG,,(Sist)] e SI~1 Sl~t RG'JI dt R.Gal (5) La sustitución de la Ec.(5) en la Ec.(4) conduce a la Ec.(1). La cantidad de movimiento del sistema es equivalente a la que tendría con toda la masa concentrada en su centro de inercia G. 8.1 TEOREMA DE LA CANTIDAD DE MOVIMIENTO 233 D R(sis!) = [I, mp)VR(G), 51St (6) y con esto la Ec.( 1) del Teorema de la Cantidad de Movimiento toma la forma (7) que constituye la versión más práctica del teorema al generalizar la ecuación de la dinámica de la partícula al caso de un sistema de materia constante: el centro de inercia del sistema se mueve como si fuese una partícula que concentrase toda la masa del sistema y sobre la que actuaran las fuerzas de interacción exteriores. .r. Demostración. En la Ec.(2) se puede sustituir, Fig.8.L2, V" (P) =y RTG (P) +V R (G), .con 10 que (8) D R(sis!) = ~In p" RTG(P)+[~mI' ]vR(G), (9) R IlREL" RTG (lO) a causa de la propiedad característica del centro de inercia (Ec7.L3). Con esto. la Ec.(9) coincide con la Ec.(6). Este resultado es una ilustración de la sistema de descomposición bíJricéntrica: materia ete Fig. 8.1.2 D R.Gul (sist) ::::: D RTG (sist) +D ~.Gnl (sist), (11) donde DRTG(sist)=O y D$R.G:JI(sist) es la cantidad de movimiento del sistema con toda la masa concentrada en G. .j. Ya que la expresión establecida por la Ec.(6) se puede aplicar a los diversos subsistem~s en que se fracciona el sistema a estudiar, una alternativa a la Ec.(7) que con frecuencla resuIta práctica eS L.m i a R.G:JI (O i) = L. Fexl (P), (12)
- 5. 1,:, 234 TEOREMAS VECTORIALES 8.2 donde n~ y Gi son respectivamente la masa y el centro de inercia del subsistema i. A menudo cada subsistema es un sólido rígido o un conjunto de sólidos rígidos. • EJEMPLO 8.1 Si se desprecia el rozamiento con el aire, un proyectil recorre una R.Gal trayectoria que es la misma que recorre el centro de inercia del sistema formado por los fragmentos del proyectil después de estallar (se desprecia la masa de la carga explosiva), Fig.a, porque l,(~M1.:Í!atttD¡;p,;~~ ,~~,,¡,,;,'t:. :r~¡"':¡~:~-%<'~~Z0r;:~!,t0iQZi1 eL.ID)aR.Gol (G) = I Fext = (2:m)g, Fig.a R.Gal Fig. b (¿Ill)aRG,,(G) = (¿m)g+ ¿F"" (¿m)a'RG'" (G) = (¿m)g+ ¿F'",. y por tanto 3R,GaleG)=g. Si se considera el rozamiento con el aire, la trayectoria del proyectil sin estallar deja de ser parabólica y es distinta de la que sigue el centro de inercia del sistema formado por los fragmentos del proyectil después de estallar, Fig.b, porque aR.Gal(G) del proyectil sin estalJar y a' R.Gal(G) del conjunto de fragmentos verifican y la resultante de las fuerzas aerodinámicas, que frena el avance, es mucho más intensa con el proyectil fr<lgmentado que sin fragmentar. Este segundo caso ilustra cómo un conjunto de fuerzas interiores - desencadenadas por la carga explosiva- que de manera directa no pueden ¡niluir en la aceleración de G. pueden bacerlo de manera indirecta si producen un cambio en el sisLema de fuerzas exteriores. Ésta es una situación frecuente en el control de vehículos: el piloto de un planeador, mediante fuerzas inLernas al planeador, modifica la geometría de éste y como consecuencia aparece el cambio de fuerzas aerodinámicas necesario para la maniobra: el de un automóvil, mediante fuerzas internas al automóvil, modifica el sistema de fuerzas de contacto que las ruedas recibt:n del suelo y consigue las necesarias para acelerar, fren::¡r y girar. + 8.2 TEOREMA DEL MOMENTO CINÉTICO PARA UN PUNTO FIJO, PARA UN PUNTO MÓVIL Y PARA G Para un sistema de materia constante, el Teorenw del Momenlo Cinético pura un punto fijo O establece que la velocidad de cambio en u~ referencia galileana del vector l1lomenfO cinélico de! sistema para el punlo 0, OKR.Gul(sist), es igual al momento resultante en O de las fuerzas de interacción exteriores que actúan sobre las partículas 8.2 TEOREMA DEL MOMENTO CINETICO PARA UN PUNTO FIJO, PARA UN PUNTO MOVIL y 235 del sistema, con R.Gal sistema de • .>---7'-- fuerzas exteriores fuerzas interiores (1) OKR (sist)" ¿ OP A mp VR(P); sist OER. (2) El momento cinético del sistema en una referencia R y para un punto O fijo en la referencia es el momento resultante respecto a O de los vectores cantidad de movimiento l11pVRCP) de las partículas del sistema en aquella referencia. Fig. 8.2.1 En la Ec.( 1) se suele simplificar la notación d~l miembro de la izquierda en la forma OKR.Gol(sist) cuando no hay ambigüedad respecto a la referencia en la que se deriva. .¡. Demostración. Para cada partícula P del sistema, Fig.8.2.1, el momento respecto a O de los vectores que intervienen en la ecuación de la dinámica establece, OP A m paR.G,' (P) ~ ¿ OP" F'm (P) +¿ OP" F,,, (P). p La suma de estas ecuaciones para todas las partículas del sistema conduce a (3) (4) En el miembro de la derecha no intervienen las fuerzas interiores porque de acuerdo con el principio de la acción y la reacción 2,Sist OPAf'¡nlep)==O, al incluir esta suma exclusivamente momentos de parejas acción-reacción que son de momento resultante nulo (Ecs. 5.4.5). El miembro de la izquierda puede expresarse en la forma _ d - ] d- . ¿ OP / m p3 R.Gol (P) = - L OP / m p"R.GJl (P) =- OKR.Ga! (s1St), ~iSl dt ~iSl dt (5) porque al ser Oe R.Gal, los términos añadidos, ~ OP / m p" R.Ga! (P) =" R.Gal (P) / m p" R.Gal (P);::: O, d-J dt R.Ga! son todos nulos. La sustitución de la Ec.(S) en la Ec.(4) conduce a la Ec.(l).
- 6. 236 TEOREMAS VECTORIALES 8.2 • EJEMPLO 8.2. I Se" el caso de un mono subido a una cuerda de masa despreciable que R Fig. a ~ /1 mg O(G)V ~ I fr I G ! I / !mg F!g. b ,m , h mvr mvr /:~ O->- v • vi • Flg. e pasa por una polea -de masa y rozamiento en el eje despreciables- y en cuyo extremo hay unos plátanos colgados, tal como se indica en la Fig.a. Mono y plátanos tienen la misma masa e inicialmente se hallan en reposo. El mono quiere llegar a los plátanos, ¿podrá conseguirlo? Si se considera como sistema el formado por el mono, los plátanos, la cuerda y la polea, las fuerzas exteriores que actúan son los pesos mg del mono y de los plátanos la fuerza de enlace en O, que tiene en principio dos componentes en el plano. En cambio no hay momento ni de enlace ni de fricción alrededor del eje de la polea. Si el mono y los plátanos se mueven verticalmente, el Teorema de la Cantidad de IvIovimiento establece, Fig.b, Así pues este teorema permite hallar la fuerza vertical de enlace en O F 1=2m(g+a(G», si se conoce a(G), pero no permite hallar cómo es el movimiento. El Teorema del Momento Cinético es adecuado aplicarlo en O. Al ser nulo el momento resultante de todas las fLlerzas exteriores respecto al eje de la pajea, el momento cinético respecto este eje se conserva, y ya que inicialmente es nulo debe mantenerse nulo. Ello hace gue si el mono sube con celeridad v también tengan que hacerlo Jos plátanos, Fig.c, de mnnera' que se mantiene constante la distancia h entre mono y plátanos, siempre que éstos no se atasquen en la polca. Al ser permanentemente iguales In celeridad v del mono y la de los plátanos, también lo son las aceleraciones a, de manera que a(G)=a y FI=2m(g+a). + En la aplicación del Teorema del Momento Cinético suele ser interesante que por el punto de aplicación pasen fuerzas exteriores incógnita -usualmente de enlace- que de esta manera no intervieJlen en las ecuaciones algébricas que se obtienen, coma en el caso del ejemplo 8.2.1. Éste suele ser el criterio para escoger el punto O,pero a menudo lwy puntos no fijos él la referencia que son más favorables según este criterio. Ello hace deseable extender el Teorema del Momento Cinético a puntos móviJes,y la manera más 8.2 TEOREMA DEL MOMENTO CINETlCO PARA UN puNTO FIJO, PARA UN PUNTO MÓVIL Y 237 simple de hacerlo es pasar a aplicarlo en la refer~ncia . no galileana con origen en el punto móvil y que se traslada respecto a la referencia gahleana. Teorema del :Momento Cinético para un punto móviL Se trata de la aplicación del Teorema del Momento Cinético en R.Gol RTB B I '1ar(P);-mp°RGO,(B) sistema eL ~r;-[L mp]oRGo,(B) °RGO,(B) la RTB que ,iene el origen en el punto móvil B )' se traslada respecto a la galifeana, Fig.8.2.2. Al ser una referencia no galileana, debe incluirse el momento resultante en B de las fuerzas de inercia de arrastre -1"IlpaR.Gnl(B) (no hay de Coriolis), que al ser proporcionales a la masa y de campo uniforme -a(B) a efectos del torsor resultante son equivalentes a la resultante -(¿;"m,)aR.e,,(B) aplicada en G. Así pues F!g. 8.2.2 B'K RTB (sist) = I BP AF,,, (P) - BG A(I m,)aR.ep' (8), $ISl 51S1 (6) con BK,ns(sist)" IBP Afi, V"TB (P), BE RTB. (7) SiSl La expresión de BK es formalmente idéntica a la utiljzada para el punto fijo, ~c.2). La Ec.(6) pone de manifiesto que el coste de aplicar el Teorema del Momento Cméuco en un punto móvil se limita a un término complementaría que tiene una interpretación f~:il que ayuda a recordar su expresión. En algunos textos se encuentra una ver~l?n alternativa del Teorema del Momento Cinético para un punto móvil que, aunque facI]¡ta el estudio' de algún problema, presenta la dificultad doble de utilizar un momento cinético de definición distinta -punto móvil en la referencia donde se consideran las velocidades para calcular el momento cinético- y un término complementario sin una inte"rpretación simple que ayude a recordar su expresión. Por este motivo no se incluye esta alternativa en este texto. Teorema del Momento Cinético para G. Si coma punto móvil para aplicar el Teorema del Momento Cinético se toma el centro de inercia del sistema -es decir, se aplica el teorema en la referencia RTG que se traslada con G-, el término complementario se anula porque la resultante de las fuerzas de inercia aplicada a G da momento nulo respecto a G, Fig. 8.2.3. Así pues
- 7. f:. ií~ 238 TEOREMAS VECTORIALES 8.3 R.Gal Flg. 8.2.3 GKRTG(sisl)~ I:GPAF",(P), (8) sis! con GKRTG (siSl) =¿;GPA ffipY RTG (P). (9) S¡~l Al aplicar el Teorema del Momento Cinético en G debe considerarse el mismo sistema de fuerzas que en la aplicación del teorema en un punto fijo O, aunque en un caso se calcula su momento en G y en el otro en O. 8.3 DESCOMPOSICiÓN BARICÉNTRICA DEL MOMENTO CINÉTICO R.Gal IIRELII RTG RTQ sislema F¡g. 8.3.1 Las expresiones de los momentos cinéticos definidos en las ecuaciones (8.2.2, 8.2.7 Y 8.2.9) son [anualmente idénticas y se pueden escribir de la fonua genérica QK RTQ (sist) ~ ¿; QP A ffi pY RTQ (P). (1) sist según Q sea 0, B o G, se recuperan las expresiones de OK, BK o GK. El momento cinético también admite la descomposición baricéntrica, de manera que la Ec.(l) Se puede expresar de la forma - -" - QK RTQ (sist) ~ QK RTQ (Sist) + GK RTG (sist). (2) Es decir, el mamenLo cinético del sistema en una referencia es igual al mOmento cinético, en la misma referencia, de toda la masa concentrada en G más el momento cinético del sistema para G. .r. Demostración. En la Ec.( 1) se puede hacer intervenir el centro de inercia G mediante las expresiones, Fig.8.3.1. (3) con la que se obLiene 8.4 MOMENTO CIN~T1CO DEL SOLIDO RIGIDO 239 (4) S¡Sl 5isl En la Ec.(4) la primera suma, que se puede~ner en la forma QG"(Ln1pVRTaCP)),y la cuarta ,suma, que se puede escribir como (LGPmp)"vRTQ(G), son nulas~r la propiedad característica del centro de inercia (Ec.7.l.3). La segunda suma es QK:TQ(sist) y la tercera es GKRTC(sist). .r. 8.4 MOMENTO CINÉTICO DEL SÓLIDO RíGIDO R.Gal Flg.8.4.1 s D RTQ Si el punto Q para el que hay que calcular el momento cinético pertenece al sólido, el tensor de inercia (Sec. 7.3) del sólido en el punto Gs está asociado a la aplicación lineal que transforma la velocidad angular Q!hodel sólido en el momento cinético QSKRTQ(sólido), Fig.8.4.I, QSK RTQ (sólido) ~ UQ~TQ' (1) Si el punto Q no pertenece al sólido, se recurre a la descomposición baricéntrica del momento cinético del sólido. - -() - QK,nQ (sólido) ~ QK RTQ (sólido)+GK RTG (sólido) ~ 3 / Fig.8,4.2 - s ~ QG AmS"RTQ(G)+UOºRTG' (2) Como el centro de inercia del sólido pertenece siempre al sólido, GK(sólido) se puede calcular siempre como IlGQ~TQ' Cuando el sistema está formado por diversos sólidos puede presentarse una dificultad con las bases vectoriales. Tal corno se ha expuesto en la Sec.7.7, la expresión del tensor de inercia de un sólido condiciona mucho la base vectorial a utilizar, y puede suceder que para distintos sólidos del sistema convenga utilizar bases vectoriales distintas, Fig.8.4.2. En este caso, el paso a una base única B se haría después de haber calculado 10$ momentos cinéticos en Q de cada uno de los sólidos, o después de calcular sus derivadas temporales.
- 8. 1, i 240 TEOREMAS VECTORIALES 8.4 + EJEl'vlPLO 8.4.1 CLlundo un automóvil acelera, la fuerza nonna! en las ruedas traseras p q Fig. a Fig. b Fig. e A purtir de estas. ecuuciones se obtiene q 11 1 Np=mg--+ma-- p+q p~qJ' NO::::: mg-P--m,-- p+q p+q aumenta y en cambio disminuye en las delanteras. Para estudiar qué factores intervienen en esta transferencia de fuerza normal se pueden aplicar los teoremas vectoriales al sistema constituido por eJ automóvil, Fig.(a). Para facilitar el estudio se considera el caso de movimiento rectilíneo y se desprecian el movimiento asociado a la suspensión y las fuerzas de interacción con el aire. En una primera fase se desprecia también la inercia a la rotación de las ruedas. Las fuerzas exteriores son peso rng fuerzas de contacto que las medas reciben del suelo: las normales de enlace Npy NQ Y las tangenciales a las ruedas motrices, de resultante T, (que son de enlace si no deslizan o de fricción si hay deslizamiento). El TCM establece. Fig.(b). mn~T } O=Np+NQ-mg' Si se desprecin la inercia a la rotación de las ruedas, GK=ü=cte. porque el chasis no tiene rotnci.ón. ConseCLlentementeel TMC en G, al ser GK=O. planteaeJ equilibrio de momentos en G Se observa cómo la aceleración a introduce una transferencia de fuerza normal de las ruedas delanteras u las traseras. de valor mah/(p+q), independientemente de cuáles son las motrices y de si bay deslizamiento o no. Si se tiene en cuenta el momento de inerci<l l~ de las ruedas respecto a su eje y éstas no deslizun, en el dlculo de GK para el centro de inercia del vehículo, cada rued<l sólo contribuye con su G; K de valor lo:v/r, Fig.c, ya que su centro de inercia G¡ es fijo al chasis y éste no tiene velocidad angular. Así pues el TMC en G establece a 41, - ~ NpP - NQq - Th, , que con las ecuaciones del TCM conduce a q h 41,) N =l112:--+ma--+---a P - p+q p+q r(p+q) p h 41, . N =mo-----mn------, Q "p+q p+q '(p+q) 8.4 MOMENTO CINETICO DEL SÓUDO RfGIDO 241 Se observa cómo la inercia a la rotación de las ruedas <Iñ<lde una nueva transferencia, de fuerza normal de las ruedas delanteras a las traseras, de valor 4Io:a/r(p+q), Como la capacidad de obtener fuerza tangencial entre las ruedas y el suelo es proporcional a la fLlcrza normal, las ruedas traseras son más adecuadas para acelerar Jos ULlomóviles. Ello explica que en los vehículos de fórmula 1 la tracción sea posterior (en los automóviles que compiten en "rallies", la tracción es delanter<l porgue esto los hace más adecuados para tomar curvas, aspecto más relevBnte en los "raBies" que la simple aceleración). • EJEMPLO 8.4.2 Flg. a 2 • En el sistema de la figura (a) el bloque descansa horizontalmente sobre dos rodillos que giron en sentido opuesto wr >Ixl con una velocidad anglllar de valor ro tal que ror> Ixl. Esta condición implica que el deslizamiento, y consecuentemente la fuerzu de fricción, entre los rodillos y el bloque tenga siempre el mismo sentido, Fig.(b). Al ser las fuerzas de fricción proporcionales a las normales, las fuerzas de contacto Fp Y FQ pasan por el punto fijo O que se halla a una altura U~. sobre el punto e centrol entre P y Q. Ya que todas lus fuerzas incógnita que actúan sobre el bloque pasan por O. la aplicación al bloque del TMC en O da directamente la ecuación del movimiento. 01>----------.,. Para el eje 3: Así pues Flg. b
- 9. 242 TE.OAEMAS VECTORIALES 8.4 h Ésta eS la ecuación de un moyjmiento harmónico centrado en x :::; O Y de frecuencia co :::; . .J¡.¡.g /(L - ).lh) rad s-I mientras L>).lh, es deCir, mientras G se halle por debajo de O. Si G se halla por encima de 0, la posición x=Ü sigue siendo de equilibrio pero eS inestable. Las fuerzas normales de enlace se pueden hallar a partir del TCM aplicado al bloque, Estas normales equivalen a la distribución estática entre los puntos P' y Q' del peso aplicado en G, Fig.(c). Los puntos P' y Q' determinan el intervalo en el que se puede mover G sin que el bloque pierda el COnt;:¡cto en Po Q. Los resultados hallados son válidos también para h<O, + + EJEMPLO 8.4.3 Fig. a La placa en forma de triángulo rectángulo isósceles de la Fig.(a) es 2 homogénea y rueda sin deslizar sobre el soporte cilíndrico fijo. Su plano es siempre tangente a la superficie cilíndrica y el cateto OP se mantiene paralelo al eje del soporte. Para 8=0 el centro de inercia G de la placa se halla en contacto con el soporte, y bajo la acción de la fuerza F(t) perpendicular a la placa en el vénice se hace variar el ángulo 6 a lo largo del tiempo. Los teoremas vectoriales, aplicados al sólido placa, permiten hallar la ecuación del movimiento para la coordenada 8 y las componentes del torsor de enlace, referido por ejemplo a J, de las fuerzas de enlace que la placa recibe del soporte. El :.istemu de fuerzas exteriores está formado por el peso Illg de la placa aplicado en G, la fuerza F(t) y el torl'oor de enh.lce que la placa recibe del sop0l1e, que se puede caracterizar en ] Flg.b Así pues 3 F(t) Q~l 8.4 MOMENTO CIN¡;:TICü DEL SOLIDO RIGIDO 243 El TCM conduce a, ma(G) = mg + FE + F(t), donde a(G) se puede hallar por derivación de v(G). Fig.(b) de donde se obtienen los valores de F¡, F2 Y FJ FI :::; mRB6¡1 - mgsenB , F2. = 0, . . 9 por su expresión en función de e y é E · la expresión de F] habría que SllStltUH n rigor, en . dada ;or la ecuación del movimiento. . . t los puntos de rodadura . . d 1TMC o hay ninoún punto fija convenlen e, . Pura el apllcac1ón e n ~ . r 1 en G (II bu sido obteOldo son des'uconsejables, de manera que queda la opción de ap lcar o . G en el t:jemplo 7.4.1) El TMC conduce a áK:=ME(J)+GJIF E+ GQIF(t), Y por tanto
- 10. , i 1 1 " I i f 1 I I I r ):; r.., , I 1,' 1: 244 TEOREMAS VECTORIALES 8,4 ±mb'{2 e e}= {~llJ+{~:}A{::}+{~:}A{ ~ }= -S' MJ O F:l O -F(!) JMI-bFJ+bF(!)} = l-R9F~ +2bF(t) . M::; + R8F2 + bF¡ Al sustituir la expresión de FJ en la segunda ecuación se obtiene la ecuación del movimiento, ,,( 1 o oo) o'o 1 82"b-+R-S- +R-SS-+gRScosS-;;;(2b-RS)F(t)=O, Las ecuaciones la y 3[1 del TMC permiten hallar MI y MJ M¡ :::: ¡mb1e+ bmR(ee+82)+bmgcos9, I ').') .') ¡VI = --mb-e- - bmRSS- +bmg sen 8. , 4 • .. EJEMPLO 8.4.4 Para hallarlas 3 ecuaciones del mo'imiento de una peonza (s6lido rotor simétrico en G con un punto fijo de la dirección central de inercia de detemlinación única) se pueden aplicar los teoremas vectoriales al sistema formado por la peonza en el cual las fuerzas exteriores son: el peso mg aplicado en G la fuerza de enlace FE en O de 3 componentes. En O el momento de enlace es nulo. El TCM establece 3 ecuaciones en las que intervienen las 3 incógnitas de enlace. Pura aplicar el TMC se puede pensar en los puntos G y ~ Las expresiones del momento cinético GK=I1Go's y OK=IIcPs son de la misma complejidad por ser el sólido rotor simétrico tanto en G como en O con el eje 3 como eje de determinación única. En lo que se refiere al momento de las fuerzas, el punto O presenta la ventaja de que en él el momento de las fuerzas incógnitas de enlnce es nulo, de manera que las 3 ecuaciones del TMC son ya las ecuaciones del movimiento. En cambio en G hay momento de FE, cosa que obliga a eliminar sus componentes entre las ecuaciones de los dos teoremas para aislar las ecuaciones del movimiento. 8,4 MOMENTO CINÉTICO DEL SÓLIDO RiGIDO 245 Aplicando pues el TMC en 0, Les 3 ecunciones del movimiento son, ITe ~ It: (cp + ji cose)j! s~n e- ITj!:! sinecose =: mgs sen e} lT'V sen e+ 2IT'f9cos9 - Ie(<p + ji cose)9 = o . lt:(<p+¡icos9-~ésene)=O -t Ie(<j:¡+ 'fcos8):::: cte. • + EJEMPLO 8.4.5 El triciclo de la Fig.a, que es de masa m con centro de inercin G (ruedas incluidas), recorre una pista circulur de manera que el punto O describe una circunferencia de radio R con celeridad constante "o. 3 -horquilla cle (dirección fija Flg. a
- 11. Lt' 246 TEOREMAS VECTORIALES 8.4 La inercia a la rotación de la rueda ddantera -pero no la de las traseras- asf como la masa del manillar-horquilla son despreciables. Las resistencias a la rodadura, al pivotamiento y ¡la fricción en los ejes también son despreciables. Los teoremas vectoriales permiten investigar la tendencia a volcar y a derrapar mediante la determinación de las fuerzas de enlace que las luedas reciben del suelo. Js O Fa TB N B F.: Fig. b con ji = vo/R; JA T A NA . Vo R + S <PA=R-r-; Para el sistema formado por el triciclo, las fuerzas exteriores son: el peso mg . las fuerzas de enlace que las ruedas reciben del suelo (Fig.b). En la rueda delantera no hay fuerza longitudinal (Fc:=O) porque es sólido auxiliar de enlace. Para utilizare! hecho de que el rozamiento en los ejes de las ruedas A y B es nulo, es adecuado aplicar a caaa una de las ruedas el TMC en su centro de inercia . Vo R-s 'l'B=---' R t' Al ser nulas las componentes 2 de GAK Y G BK ,deben ser nulas las fuerzas longitudinales en esl¡L'i ruedas; FA=Fs:::::O. Para el sistema triciclo, el TCM establece ma(G)=mg+FE(JA)+FE(JS)+FE(JC), y por tanto -m(~o/R-)p=-Tc sen 8 , , } m(v6/R):::; +Tccos8+T , O=-mg+N A +Ns+Nc Con tg8=UR y T:=:TA+TS, (hay indeterminación entre TA )' Tg). Las dos primeras ecuaciones conducen él T = O1vf¡(L - p)/(RL), 8.4 MOMENTO ClNETICO DEL SÓLIDO RiGIDO 247 El TMC aplicado en G establece El momento cinético GK proviene del chasis del triciclo y de las ruedas posteriores. Ya que G no pertenece a las ruedas, para éstas hay que recurrir a la descomposición baricéntrica. pero GK@(ruedaA)=TIc (masa de la rueda A concentrada en GA) ji, GK$(rueda B):;:;:IIc (masa de la rueda B concentrada en Gs)ji, y ya que GAy Gs son fijos al chasis, lIe (chasis)+IIc (masa de la rueda Aeo GA)+IIc (masa de la meda B en Gs)""lIG. Para lIe el eje 2 es central de inercia porque el plano 1-3 es de simetría. Así pues A partir de las ecuaciones de los dos teoremas se obtiene L-p 1 21[r pI' 1):, 21.:J NA = mg--+-I11Vo- ---+--+-- , 2L 2 R s RL mRL rms L-p I 11[r pI' 1), 21.:] NB= mg----mvo- -+----''+--, 2L 2 R s RL I11RL nu's Nc = mg.E.+mv6 1:; [l-~], L R-L mrp
- 12. 24 8 TEOREMAS VECTORIALES 8.5 El primer lérmino de est::lS expresiones corresponde al valor estático y el se~tlndo describe el incremento a cnusa de la dinámica. La disminución de N B según un témuno proporcional ti Y02 muestra la tendencia del vehículo a volcar. En la curva dada, la máxima velocidad Vo a purtir de la cual B pierde contacto con el suelo COlTcsponde a NB=O y es I (l-.E) v -/crR L om~x - o r pr 1 21· -+---'-'-+-' s RL mRL mrs Hay que tener en cuenta qlle 11• 1 puede ser ><0 y que su término es, en principio, pequeño respecto al conjunto de Jos otros. Que las ruedas no derrapen impone T<Il(NA +NB) y Tc<)1Nc. • 8.5 FORMA INTEGRADA DE LOS TEOREMAS VECTORIALES. LOS VECTORES IMPULSO DE UNA FUERZA E IMPULSO DE U N MOMENTO Como Jos teoremas vectoriales evalúan la velocidad de cambio de un vector asociado al sistema, su integración temporal evalua el cambio finito de este vector. Así el Teorema de la Cantidad de Movimíento conduce, por integración, a " = JI, F", (P)dt• ti sisl .ó.DRG<lt(sist))" . '1 (1) o bien, si se utiliza la versión relativa al movimiento de G, (2) La integración temporal de una fuerza se denomina impulso de ra fuerza. El segundo miembro de 18.s Ecs.(!) Y (2) es el impulso de la resultante de las fuerzas exteriores que actúan sobre el sistema. En particular, si esta resultante es nula se conserva la cantidad de movimiento del sistema, o la velocidad de su centro de inercia. El Teorema del Momento Cinético conduce, por integración, a " "OK".co' (sist)]" = ]I,M",(O)dt. ti ti sis! (3) (4) h L.GKRTG(sist)r" " = ]I,M,,,(G)dL (5) 1 1 ~ir.1 8.5 FORMA INTEGRADA DE LOS TEOREMAS VECTORIALES. LOS VECTORES IMPULSO,.. 249 La ¡otearal temporal de un momento se denomina impulso del momento, El segundo miembl~de las ecuaciones (3) y (5) es el impulso del momentoresultant~ ~e las fuerzas exteriores en O y G respectivamente. En el caso del TMC en un punto mov!l, el segundo miembro incluye, además del impulso de Ll.1ex /B), el impulso del momento de la resultante de las fuerzas de inercia aplicada en G, En los casos de momento resultante nulo en O o en G, hay conservación del momento cinético OK o GK. respectivamente. Hay que tener presente que en el caso de un sólido rígido la conservación del momento cinético en uno de sus puntos no implica, en principio, la conservación de as ya que la relación entre as y el momento cinético en un punto del sólido a pesar de ser lineal no es de simple proporcionalidad. + EJEMPLO 8.5.1 En una barra que avanza con celeridad va sobre una mesa horizontal perfectamente liso, Fig.(a), la componente horizontal de la velocid<ld de su centra de inercia cuando ya ha abandonado el contaclo con la .;'.' ~ =0 ~9 :~:~:a;~~~C;i~:p~U:ne~~~~e';~ ~~;;:~::;:e~: .~ contacto, con inclinación creciente, con la arista de la mesa, Fig.(b). Durante este intervalo la ,'.~ fuerza normal de enlace tiene componente ',. horizontul en el sentido de va' cuyo impulso Fig. a hace aumentar la velocidad horizontal de G. N mg Fig. b Fig, e + EJEMPLO 8.5.2 Una bola maciza se Innza tangencialmentesobre un suelo horizontal con Vo Fig. a rozamiento seco de coeficiente 11 con velocidad de avance V o pero girando con úJo en sentido contrario al que correspondería a la rodadura perfecta, Fig.(n). Después de un tie,mpo t la bol8 llega a las condiciones de rodadura perfecta. El movimiento final de la bola y el tiempo t pueden hallarse a partir de los teoremas vectoriales en forma integrada. Mientras hay deslizamiento, en J existe la normal de valor mg y la tangencial de valor. ).1mg opuesta al deslizumíento y en este caso opuesta al avance inicial. Para las velocidades ". y CD indicadas en la Fig.(b) los teoremas vectori::tles, en forma integrada, establecen
- 13. 250 TEOREMAS VECTORIALES 8.6 Fig. b W -=--o mg v ~mg m(v-vo)=-flmgt 1 mp'(úl+ Wo) = ~mgrtJ' donde p ;::: r.J2i5 en el caso de una bola maciza. Estas ecuaciones junto con la condición V=(¡lr de rodadura perrecta conducen a v = Wt' = (va -A'rwoj/(l+).'j. t = (ve + wür)l.' /~g(1 + A'j. donde ¡..:!=p:!fr2=ldmr2=2.15 para el caso de una bola maciza, para la cual v = ú)r = (5'0 -2rcou)l7, t = (vo + wor)2/(7~g). La bola queda par<lda si 0)0=2,5vo/r, y acaba retrocediendo si wo>2,5vo/r. • 8.6 EXTENSiÓN DE REFERENCIAS NO L O S TEOREMAS GALlLEANAS VECTORIALES A LAS Para extender Jos teoremas vectoriales a las referencies no galileanas sólo hay que introducir las fuerzas de inercia, de arrastre y de CorioEs que correspondan. Como en el caso de estas fuerzas no existe la reacción, tienen un tratamiento análogo al de las fLlerzas exteriores en la formulación de los teoremas. Así el Teorema de la Cantidad de Movimiento toma la forma (1) y el Teorema del Momento Cinético para un punto O fijo a la referencia, Fig. 8.6.1, F¡g. 8.6.1 R No Gol sistema (2) donde 2:.5Wur(O) Y 2:Mcor (O) son el momento resultante respecto a O de las fuerzas de inercia de arrastre y de Coliolis, respectivamente. En 10 que se refiere a las versiones del teorema del momento cinético para un punto móvil B y para G, Fig. 8.6.2, las fuerzas de inercia que hay que incluir son, en principio, las correspondientes a las referencias RTB y RTG que se trasladan 8.6 EXTENSiÓN DE LOS TEOREMAS VECTORIALES A LAS REFERENCIAS NO GAULEANAS 251 Flg. 8.6.2 R No Gol RTB B RTG G sistema con B Y G respectivamente. Ahora bien, según se ha visto en la sección 5.10, ya que la suma .Jur (P)+ .Jcor (P) para cada particula en la RTB o RTG es igual a esta suma para la ref. de estudio R más -maR(B) o -rnaR(G) respectivamente, las versiones de los teoremas en B y G son análogas a las halladas para referencias de estudio galileanas añadiendo el momento resultante en B o G, de las fuerzas de inercicl correspondientes a la referencia de estudio R. Ú('<TB (sisr) = I M", (B) + I M" (B)+ I Meo, (B) - BG A(I m, )aR (B), (3) ~bt SISt $I~t ,ISI (4) Hay que decir que estas versiones, Ecs.(l, 2, 3, 4), no se suelen utilizaren el caso del sólido rígido, O de sistemas formados por sólidos IÍgidos, a causa de la dificultad en hallar los momentos resultantes de las fuerzas de inercia, cálculo que obligaría a hacer integrales extendidas a los dm de cada sólido. Aunque en la referencia no galileana el movimiento de los sólidos pueda ser más simple, es mejor utilizar una referencia galileana, a pesar de la mayor complejidad del movimiento, porque en éstas no hay que hacer ninguna integración explícitamente (las necesarias están implícitas en las componentes de los tensores de inercia ). • EJEMPLO 8.6.1 Una barra delgada de masa m que puede oscilar alrededor del eje Fig. a horizontal a-a' fijo a un soporte que gira con Q cte. alrededor de un eje vertical fijo al suelo, Fig.(a), puede mantener un ángulo 8 cte. comprendido entre 8=0 y 8=1t/2. P¡¡ra hallarlo se puede hacer un estudio del equilibrio estático en la referencia R' solidaria al soporte, que es no galileana, Fig.(b). El momenLO del peso bu de equilibrar el momentO de las fuerzas centrífugas. ?L ) mgL sen 8~ :::;: -J.Q2 (5+ Xsen 8~)xcos8~ ?n~ dx = Q2mLcos8!(5+ ~L sen ee . O - Esta ecuación trascendente, que se puede escribir en la forma
- 14. 252 TEOREMAS VECTORIALES 8.6 Fig. b _tone ds 9 o e, fT "2 Frg. e n Fig. d :l..cÍL 3 9 e 2 siempre tiene una solución O::;Se::;rc/2, Fig.(c). Es importante notar que si bien la resultante de las fuerzas centrífugas, :E !F:= =nl.Q2(s+LsenS), es equivalente a la que se hallaría si toda la masa estuviese concentrada en G, el momento resultante en B de las fuerzas centrífugas no corresponde al momento de la resultante aplicada en G. Es mayor porque las fuerzas centrífugas sobre los puntos más bajos son más intensas por estar más lejos del eje de giro de la rotación del soporte. El ángulo Se cte. también Pllede hallarse planteando la dinámica en la ref. galilcana fija al suelo, Fig.(d). El TMC aplicado en B conduce directamente a la ecuación del movinliento La Ec. BK=I:I'vI~X(B)- BG Ima(B) conduce a la misma ecuación trascendente hallada antes para determinar eco En este procedimiento el problema ha sido auténticamente de din{mlica pt::ro no ha sido necesario hacer integraciones explícitas sobre la barra; las integraciones están implícitas en los elementos del tensor de inercia lIB' + 8.1 EQUILIBRADO ESTÁTICO Y DINÁMICO DE UN ROTOR Lo.'> rotores -sólidos rígidos que giran alrededor de un eje fijo a la referencia de estudio- constituyen uno de los casos más frecuentes de dinámica del sólido rígido-es el caso de 8.1 EQUILIBRADO ESTÁTICO Y DINÁMICO DE UN ROTOR 253 los rotores de motores eléctricos, de las ruedas de automóvil, de los cigüeñales de los motores alternativos, etc.-. Si su distribución de masa es arbitraria, su rotación en una referencia galileana implica, en principio, la intervención de unas fuerzas de enlace en los soportes, perpendiculares al eje de giro, que giran con velocidad angular del rotor y que crecen con el cuadrado de esta velocidad angular. En este caso se dice que el rotor está desequilibrado. Las correspondientes reacciones recibidas por los soportes tienden a hacerlos vibrar y a hacer vibrar la estructura a la que están fijados; estas vibraciones y el ruido consiguiente no Son deseables. Sin embargo, los rotores pueden tener una distribución de masa que no implique reacciones de enlace asociadas a la rotación; entonces se dice que el rotor está equilibrado. El equilibrio de un rotor exige dos condiciones: 1. Que el centro de inercia esté sobre el eje de giro. Ésta es la condición denominada equilibrio eSlático del rotor porque se puede comprobar en situación estática: en presencia de la gravedad y con el eje de giro horizontal, el equilibrio angular del rotor es indiferente, todas las posiciones angulares son de equilibrio. En cambio, si G está fuera del eje de giro hay sólo dos posiciones de equilibrio: la de G en posición más baja, que es estable, y la de G en posición más alta, que es inestable. 2. Que el eje de giro sea paralelo a una dirección central de inercia. Ésta es la condición denominada equilibrio dinámico del rotor porque sólo se puede comprobar en situación dinámica, es deci1; en rotación. Así pues en un rotor equilibrado -estática y dinámicamente- el eje de giro es una dirección central de inercia. oto Demostraci6n. En esta demostración se prescinde del peso porque no es relevante. Fig. 8.1.1 de donde se concluye . , b Fp =mQ-e--; a+b . , a FQ=mn-e-- a+b Se considera un rotor que gira con velocidad angular .Q cte. alrededor del eje de giro definido por los dos soportes P y Q. • Si G se halla a una distancia e del eje de giro y éste es paralelo a una dirección central de inercia , Fig.8.1.1, como G tiene ac.eleración axípeta de valor 0 2e y GK=O porque GK es paralelo a Q y de valor constante, los teoremas vectoriales establecen
- 15. l' 254 TEOREMAS VECTOR1ALES 8.1 a Fig. 8.1.2 el sólido, GK es perpendicular a GK y a.a. En este caso en que el rotor equilibrado dinámicamente estáticamente, se fuerzas de proporcionales a Q2 que se sobre el plano axial que contiene • Si G se halla sobre el eje de giro éste no es una dirección inercia, Fig. 8.1.2, no se necesita fner;;'U' resultante de enlace porque "'lJ)'=U, pero sí se necesita mQmento resu:ltant';,¡,'':! de enlace porque GK;;t;O al ser un vector de módulo constante fijo respecto al sólido pero de dirección distinta a la de .o. Como GK gira con Se necesitan pues unas fuerzas de enlace que formen par F"p =-F"Q =jGKj/(a + b) contenidas en el pInno axial que contiene a GK y con el sentido adecuado al de GK. Ya que IGK Ies proporcional a n, IGK 110 es a n2, Así pues, en el caso de un rotor equilibrado estática pero no dinámicamente, son necesarias también dos fuerzas de enlace giratorias proporcionales a Q2, Analíticamente, el TCM y el TMC en G plantean, para un rotor desequilibrado estática y dinámicamente, (utilizando la base indicada en la Fig. 8.1.1) En la dirección 3 se ha supuesto que sólo hay fuerza de enlace en P para evitar que haya indeterminación. Estas ecuaciones conducen a Fpl =-mn'e b/(a+b)-II1Q ' /(a+b), FQI =-mn'ea/(a+b)+IIJQ2 /(a+b), F" =-FQ2 =-1 "n' /(a + b), s.e CUESTIONES 255 Los térnlinos proporcionales a e describen el efecto del desequilibrio estático y los proporcionales a 113 y 123 describen el del desequilibrio dinámico. .fe de eqUil~ibrodO IIp!! dQ Aunque los rotores se proyectan para que esten equilibrados, los pequeños errores geométricos y las pequeñas faltas de homogeneidad de los materiales hacen que una vez construidos presenten un cierto grado de desequiliÚio. . !IQ!! masas añadidas al rotor Fig. 8,1.3 Q ete La operación de equilibrado corrige este desequilibrio por adición de dos masas en dos planos perpendiculares al eje (Hg. 8.1.3). Los valores 111prp y Ilfo así como los ángulos ap y aO se determinan a partir de la medición de los efectos de los desequilibrios en los soportes (sea la fuerza o el movimiento vibratorio). Al ser equivalente situar mr con un ángulo a que -mrcon un ángulo 0:+180°, a menudo es preferible utilizar valores m r negativos que se consiguen haciendo agujeros en lugar de añadiendo masas. Los rotores cortos, como las ruedas de automóvil, se equilibran a menudo en un solo plano y se garantiza s610 el equilibrio estático.Aunque este equilibrado se podría hacer en condiciones estáticas, es mejor hacerlo en condiciones dinámicas porque, al crecer las fuerzas causadas por el desequilibrio proporcionalmente a Q2, se tiene más sensibilidad en las mediciones. S,C CUESTIONES 8.1 Sobre la plataforma circular horizontal que puede girar alrededor del eje vt:rtical que pasa por su centro G, actúa la fuerza horizontal F, que forma un ángulo a con la dirección radiaL ¿Cuál es la componente horizontal de la fuerza que el cojinete ejerce sobre la plataforma? A B e D E Depende de las resistencias pasivas del cojinete. ~F tg a -F Sen a -F Depende del valor de s.
- 16. 256 TEOREMAS VECTORIALES a.e 8.2 Se atornilla un tornillo a una pieza fija aplicando una fuerza F normal a la llave y al eje del tornillo. Si se considera que la masa de la tlave es despreciable, ¿cuál es el valor de la fuerza horizontal que el tomillo transmite a la pieza? A F siempre. B <F siempre. e <F sólo mientras se atornilla. D ==F sólo cuando ya está completamente atornillado. E Puede ser > < E 8.3 El sistema de la figura tiene movimiento plano. El sólido de masa m puede girar libremente alrededor del punto fijo O y su punto P está articulado a la barra PQ, de masa despreciable, cuyo extremo Q puede deslizar libremente a 10 largo de la rectaee'. Si T es la tensión del hilo, ¿cuál es la componente horizontal de la fuerza de enlace que el sólido recibe en O? 8.4 A T(Idm4s'J B T(I-!dm4s'J e o D T E 2T En una competición. dos contrincantes que se hallan en el interior de un círculo sobre un suelo horizontal se empujan mediante una barra. Gana el que hace retroceder al otro hasta excluirlo del círculo. Se puede afirmar que: A Empatan si la masa de J<I b<lrra es despreciable, porque entonces se empujan necesariamente con la misma fuerza. B Gana el que consigue ejercer más fuerza horizontal sobre el suelo. e Gana el más fuerte. D Gana el más <lIto. E Gana el más pesado. 8.5 Un rodillo descentrado rueda sin deslizar sobre un plano inclinado mientras baja en la dirección de máxima pendiente de éste hasta que en P abandona el plano. La trayectoria que describe G entonces es: A B e D E Parabólica de eje ve11icaL Parabólica de eje p-p'. Parabólica de eje comprendido entre la vel1ical y p~p'. De tipo Q. De tipo Q'. 8.9 S.C CUESTIONES 257 8.6 El rodillo de la figura, que es homogéneo, baja rodando sin deslizar por una rampa fija, y cuando entra en contacto tangencial con la cinta transportadora, su centro tiene la misma velocidad Vo que la cinta. La velocidad de la cinta se mantiene constante. ¿Qué se puede decir sobre la velocidad v del centro del rodillo respecto a la referencia fija a partir del instante en que el rodillo entra en contacto con la cinta? A Disminuye pero no se anula. B Se mantiene, e Disminuye hasta anularse, D Disminuye hasta cambiar de sentido. E Aumenta. 8.7 Una moto acelera haciendo patinar la rueda motriz con la rueda delantera levantada. El ángulo a es constante y la rueda motriz tiene un momento de inercia Ir respecto a su eje. ¿Qué se puede afirmar sobre la aceleración del centro de inercia de la mOlO? A Es ¡lg. B Es O. e Para calcularla habría que conocer la masa de lo. moto y ltl potencia de su motor. D E Es ¡..tgcoSiX. Es menor que ¡J.g pero en principio distinta de J..LgcosCt. 8.8 El plano de la figura es horizontal. El sólido constituido por las dos poleas solidarias y con centro de inercia en el centro geométrico, desliza sin rozamiento sobre el plano. Los extremos P y Q de los hilos enrollados a las poleas son desplazados con aceJemción a. ¿Qué se puede decir de las fucrzas Fp y FQ quc hay que aplicar en P y en Q? A Fp > FQ en una cantidad que no depende de IG' B Fp > FQ en una cantidad que depende de Ic· e Fp = FQ D FQ > Fp en una cantidad que no depende de IG' E FQ> Fp en una cantidad que depende de le· Se depositan sobre un plano rugoso unu bola vacía y aIra maciza homogéneus, ~e radio y musa distintos, pero con el mismo coeficiente de roz.amiento con el plano. En el mstanle inicial las bolas airan alrededor de un diámetro horizontal y sus centros están en reposo. ¿Qué se puede afi~mar de la celeridad de los centros de las bolas mientras éstas deslizan? A B e D E Es mayor la de la bola maciza. Es mayor la de la bola mayor, Son iguales. Es mayor la de la bola vacín. Es' mnyor la de la bola de masa mayoe
- 17. 25 B TEOREMAS VECTORIALES S.C 8.10 Una máquina quitanieves que se encuentra detenida en una pendiente de ángulo (J. se pone en marcha pendiente arriba haciendo patinar las cadenas. Se acepta que el rozamiento entre cadenas y suelo es de Coulomb. ¿Qué se puede afirmar de su. aceleración? A Es )lgcosa. B Se puede aumentar incrementando la velocidad de circulación de las cadenas. o<. e Es gcosa(ll-tga). Es Ilg. ~:~;;;;~~f:Jili;p!;i"'''W·1!1~,0·'"''1~ D ~p,m uV Qm ¡ E Se puede aumentar incrementando el par motriz aplicado a las ruedas que accionan las cadenas. 8.11 Una bola que avanza deslizando sobre un plano horizontal liso Jo abandona al perder Contacto en Q. Antes de llegar a Q la celeridad de su centro es Vo y el rozamiento con el aire es despreciable. Una vez perdido el contacto con el plano, ¿cómo es la componente horizontal de la velocidad de G? A = Yo B > "o e < "o D ;::: "o E :::; va 8.12 Inicialmenteel camión y el rodillo que se encuentra sobre él están en reposo. El suelo y la caja del camión son horizontales. Si el camión empieza a avanzar con aceleración a constante, se observa que el rodillo rueda hacia atrás respecto a la caja. ¿Qué se puede decir de la posición del rodillo respecto al suelo cuando llega al extremo O de la caja? A l?slá entre P y P'. B Coincide con P. e Está entre P y Q. D Coincide con Q. E Estú entre Qy Q'. 8.13 Sobre un plano horizontal liso, las partículas P y Q se acercan y mueven alrededor de los puntos fijos O y O', respectivamente. P se acerca porque se acona el hilo, y Qporque el hilo se enrolla alrededor de un cilindro fijo de radio r. ¿Qué se puede afirmar de las celeridades de P y Q? A Se mantienen constantes. B La de P se mantiene constante y la de Q aumenta. C La de P aumenta y la de Q se mantiene constante. D Las dos aumentan. E La de P se mantiene constante y la de Q disminuye. s.e CUESTIONES 259 8.14 La masa de la polea y el hilo, así como los rozamientos, son despreciables. ¿Cuál es la fuerza vertical, expresada en N, que ejerce el sopOlte sobre la polea? (tomar g=lO m S-2). A !O B 14 e 20 D 24 E 34 8.15 En el sistema de la figura, las dos poleas son solidarias y los hilos se enrollan sobre ellas sin deslizar. La masa de las poleas y los hilos, así como el rozamiento en el eje, son despreciables. ¿Cuál es el valor de la fuerza vertical de enlace, expresada en N, que el eje de las poleas recibe del soporte? (tomar g=lO rn S-2). A 160 B 90 e 220 D 300 E 130 8.16 La placa cuadrada de la figura -de masa m y lado 2L- está unida al suelo mediante las barras PP' y QQ' de longitud s que tienen en sus extremos articulaciones de ejes normales al plano de la placa. ¿Cuánto vale el momento, referido al centro de inercia, de las fuerzas de enlace que la placa recibe de las barras? A (1/3)mL' e B o e (4/3) ro L' e D (2/3) ro L' e E (1/3) m (L2+s2) e 8.17 El bloque del sistema se mueve con movimiento plano sometido al peso y a los enlaces PP' y QQ' establecidos por barras de masa despreciable con articulaciones en sus extremos de rozamiento nulo y ejes normales al plano de la figura. En un cierto insUlnte, el sistema pasa por la posición representada con é*0 y 9:;<:.0. ¿Cuánto vale la fuerza que ejerce la barra PP' en este instante? A B e D E mg/(2cos8) o mg cose rng/cos8 mg/2
- 18. ! f, 1, l' " l' 1 [, [ f" 1" ¡,;II t, I 1,' I 1, 1 ¡, r I 1 í 1, I I 260 TEOREMAS VECTORIALES a.c 2 I, 3 2R S.l S La placa delgada y homogénea en forma de estrella regular de tres puntas gira con velocidad angular constante alrededor del eje vertical contenido en su plano y que pasa par el centroG. ¿Quése puede decir del momento resultante de enlace, referido a G, que la placa recibe del eje giratorio? A Es perpendicular a nydepende de ex. B Tiene la dirección de n y depende de ex. e Tiene la dirección de n yes independiente de a. D Es nulo. E Es perpendicular <1 nyes independiente de ex, 8.! 9 Una rueda, que es rotor simétrico en G con dirección central de inercia singular según el eje 1, tiene momentos de inercia le y It respecto a los ejes J y 2 respectivamente, Si se hace girar con velocidad angular constante .Q alrededor de un eje que pasa por G y forma un ángulo a. constante con el eje 1, el momento referido a G que hay que aplicar sobre la ntcda es: A Nulo, B (le-Il).o2 sena cosa sobre el eje 3 negativo. e (lecosu-It sena.).o2 sobre el eje de giro. D le.o2 cosa sobre el eje I positivo y Il ,Q2 sena sobre el eje 2 positivo, E le Q2 coso: sobre el eje 1 positivo, 8,20 La esfera homogénea de la figura rueda sin deslizar sobre el suelo horizontal fijo y la barra radial de masa despreciable, solidarin a ella, tiene el extremo O fijado al suelo mediante una rótula esférica. Se observa que G se mueve con celeridad v constante. ¿Cuál es el módulo del momento resultante en G de las fuerzas que el sólido recibe del suelo? A B e D E (3/5) m v2 . (2/5) ro v2 (1/1 O) m v' O (l/S) m v2 8,21 Alguien afirma que si un sólido rígido está girando, el momento resultante respecto a su cenLro de inercia de las fuerzas exteriores que actúen sobre él es proporcional a su ucelerución ungulnr, ¿Qué se puede decir de esta afirmación? A Siempre es fulsa. B Es ciertn 5610 si In vclocidud angular del sólido es paralela a una dirección central de inerciu. C Es cierta sólo si la aceleración del centro de inercia es nula, D Es cierta si el movimiento del sólido es plano, E Siempre es cierta. ~g q' s.e CUESTIONES 261, 8.22 El sólido de la figura, hecho de chapa homogénea, puede girar libremente alrededor del eje p-p' de la horquilla que a su vez puede girar libremente alrededor del eje vertical q-q'. En reposo el sólido está en equilibrio con su eje ss' en posición horizontaL ¿Puede mantenerse el sólido en rotación alrededor del eje vertical conservando el eje ss' horizontal, sin que intervengan más fuerzas que las de enlace y el peso? A Sí, pero con velocidad angular por encima de un cierto valor umbral. B Sí, pero con velocidad angular por debajo de un cierto valor umbraL e Sí, porque la rotación alrededor de q-q' es libre, D No porque el centro de inercia no está sobre ss' , E No, porque q-q' no es una dirección central de inercia del sólido, 8,23 La placa rectangular de la figura está suspendida por el hilo 0'0. Para mantener su movimiento de rotación alrededor de la diagonal OQ en la posición indicada con .Q constante, ¿qué fuerza debe aplicarse sobre P? A Una fuerza en la dirección de GP. B Una fuerza vertical. e Ninguna fuerLa. D Una fuerza en la dirección perpendicular al plano de la placa, E Una fuerza en la dirección horizontal del plano de la figura. 8,24 El octaedro de la figura, que es homogéneo, se cuelga de un hijo por uno de los puntos indicados. A partir del reposo estático se le comunica un movimiento de rotación mediante la torsión del hilo y se observa que para uno de los puntos indicados el hijo deja de mantenerse verticaL ¿Cuál es? A Q B P e s D T E R 8.25 El sólido de la figura, hecho de chapa homogénea, se cuelga de un hilo por uno de los puntos indicados, y se le comunica un movimiento de rotación mediante la torsión del hilo. ¿Para qué punto se mantendrá vertical el hilo? A A B B e e D D E E
- 19. 262 TEOREMAS VECTORIALES s.e 8.27 8.28 8.26 El sólido rígido de la figura, que gira con velocidad angular no alrededor de un eje inclinado definido por dos puntos fijos del sólido, tiene el ce¡¡tro de iflercia G ¡Llera del eje de giro. Si los enlaces en P y Q desaparecen de repente en un mismo instante, ¿qué se puede decir sobre la trayectoria que pasa a seguir O? A Es vertical. B Es parabólica sobre·un plano vertical. e Es parabólica sobre un plano normal a PQ. D Es de tipo S sobre un plano vertical. E Es de tipo S sobre un plano normal a PQ. Si en el sólido de la cuestión anterior la posición de G es arbitraria, ¿qué se puede afirmm de la dirección que tendrá la D.del sólido cuando desaparezcan los enlaces P y Q? A B e D E Se mantendrá siempre igual a la de Do. Se mantendrá igual a la de Do sólo si PQ es una dirección principal de inercia. Se mantendrá sólo si PQ es un eje centrnl de inercia, Se mantendrá sólo si PQ es parnlelo a un eje centrnl de inercia. Será constante pero distinta de la de PQ, Para los~lidos rígidos, sobre si hay una relación biunívoca entre las condiciones Q constante y GK constante se puede afirmar: A Siempre es cierto, B Q constante implica GK constante, pero no a la inversa, e GK constante implica Q constante, ~o no a la inversa. D En principio ni Q constante implica GK constante, ni viceversa. E Es cierto en el caso de los rotores simétricos pero no lo es en el caso general. 8.29 Un sólido plano en forma de triángulo equilátero se apoya sobre un plano horizontal1iso mediante los vértices P y Q y del pie S' vertical y solidario a la placa, En el movimiento más general de este sólido, sin más fuerzas que el peso y las de enlace en P, Q y S', el valor de la fuerza de enlace en S' , comparado can el v<llor que tiene en condiciones estáticas, es: A Igual. B iVlayoJ: e Mayor pero:::; mg/2, D Menor. E Mayor, igualo menor según el movimiento. 8.30 La bola homogénea se mueve sin deslizar ni en P ni en Q en el interior de una cavidad cilíndrica. Su centro tiene celeridad cte. v. En Q sólo hay rozamiento en la dirección tangencial perpendicular al plano del dibujo. ¿Qué se puede decir de la fuerza normal en Q? A > mg. B = mg. e < mg, D < mg sólo para v>vmin' E Depende del sentido de rotación. plataforma 1) plataforma S.C CUESTIONES 263 8,31 Se observa que una peonza realiza un movimiento dI;:: precesión con inclinación 9 constante y con la velocidad l.jJ indicada en la figura. ¿Qué se puede afirmar sobre el sentido de la rotación propia de la peonza alrededor de su eje? A B e D E Tiene sentido positivo, Tiene sentido negativo. No se puede afirmar nada porque sao velocidades cinemáticamente independientes, No se puede afirmar nada si no se conocen más variables dinámicas del sistema. Depende de si ji es mayor o menor que un cierto valor umbral l.jJ o' 8,32 Los dos bloques homog¿neos de la figura se dejan en reposo en la posición indicada, Si el rozamiento en los puntos de contacto es despreciable, ¿qué se puede afinnar del sentido de la velocidad angular que adquirirá cada bloque? (Mov, plano). A B e D E Será negativo para los dos. No están definidos porque los dos bloques adquirirán movimiento de translación. Será positivo para los dos. , . Será negativo para el bloque superior y el bloque mfenor no Se moverá, Serán de signo contrario. 8.33 El sistema de la figura, que está sobre Un plano l1oriz.ont¡:¡l liso, está formado por dos plataformas unidas por una cuerda enrollada a un tambor solidario a la plataforma 1 y a un tambor giratorio de la plataforma 2. La masa de los tambores es despreciable. Si se parte del reposo, ¿qué se Pllede decir del movimiento de las platafonnas? A No se mueven porque el motor que acciona el tambor no puede ejercer par por falta de rozamiento entre plataforma y suelo. B G1 YG2. se mueven sobre la recta G1G2 Ylas plataformas giran en sentidos opuestos. e G I Y O2 se mueven sobre la recta G1G2 Y las platafOlmas oiran en el mlsmo sentido. D G I Y G:? se mueven sobre paralelas a PQ y las platafoffi1,¡:; giran en :-;entidos opuestos. . E G I Y G2 se mueven sobre paralelas 11 PQ y las platufoffi1as giran en el mismo sentido.
- 20. (:! ' l ' " , I r 1 , l' i 1", I ' I I I 1 ", .':' 264 TEOREMASVECTOAIALES s.e entrada salida 8.34 En un elemento de transmisión con resistencias pasivas despreciables e inercias despreciables, los ejes de entrada y salida son colineales y giran en el mismo sentido. Si el par aplicado al eje de entrada es r y el par transmitido por el eje de salída es 4 r, ¿cuál es la componente en la dirección de los ejes de entrada y salida del momento que la carcasn recibe del soporte fijo? 8.37 par transmitido a las ruedas A B e D E o 3r -H sr -5 r 8.35 El puente posterior de un camión (conjunto formado por el diferencial yel soporte de las ruedas posteriores) recibe un par r del eje motriz, ytransrrute un par sr a cada rueda posterior, que giran en el sentido indicado. ¿Qué momento respecto al eje p-p' que pasa por e transmite el puente al chasis si entre ellos no hay movimiento relativo y las inercias a la rotación del diferencial son despreciables? A 5 r B O e lor D Jlr E 9 r 8.36 Un vehículo todo terreno sube por una pendiente con celeridad constante, propulsado mediante un cabrestante y sin aplicar ningún par motriz o de frenado a las ruedas. El valor de la reacción normal al suelo en las ruedas posteriores, comparado con el que tendría propulsado por las ruedas, es; A Siempre menor. B Menor sólo si 11>r. e Mayor si h<r. D Igual. E No se puede saber sin conocer el radio del cabrestnnte. Para el vehículo de la cuestión anterior, en el que se considera despreciable la inercia de las ruedas, si el cable se rompe, ¿cómo es el valor de la reacción normal al suelo en las ruedas posteriores. comparado con el que tenía antes de romperse? A Siempre menor. B Menor sólo si h>r. e Mayor si h<l'. D Igual. E No se puede saber sin conocer el radio del cnbrestante. 8.40 s.e CUESTIONES 265 8.38 En el sistema de la figura, los rodillos homogéneos de masa m, no deslizan sobre el suelo ni respecto al bloque. Al estirar el bloque con la fuerza F, de si la reacción normal en J aumenta o disminuye, respecto a las condiciones estáticas, se puede afirmar: A B e D Disminu'ye para cualquier valor de h<H. Aumenta para cualquier valor de h<H. No varía para cualquier valor de h<H. Parn h<H, puede aumentar, disminuir o no variar, según el valor h1H. E No varía si ll=H. 8.39 Con el vehfculo de juguete de la figura sepurado del suelo, se embala la rotación de las ruedas traseras ~de momento de inercia I~ hasta una velocidad angular (o, y después se deja sobre el suelo. La fricción entre el suelo y las ruedas impulsa el vehículo haciéndolo avanzar. Se consideran despreciables la inercia a l::t rotación de las ruedas delanteras y las resistencias pasivas distintas de la fricción de las ruedas traseras con el suelo. Al comparar la fuerz::t normal que el suelo ejerce sobre las ruedas traseras mientras éstas deslizan (Nd) con la que ejerce en condiciones estáticas (Ne) se puede afirmar que: A Nd>Ne B Nd<Nt.' e No=N, D Nc?-Ne, según el vaJor de diversos parámetros del vehículo no especificados. E Nd><NO!, según el valor de diversos parámetros del vehfculo no especificados. Un inventor afirma haber proyectado un dispositivo pura los automóviles que evita que cuando éstos aceleren disminuya la fuerza normal en las ruedas delanteras y que cuando frena disminuya en las traseras. El dispositivo se basa en un rotor de eje transversal n.I vehfcL1Jo gue se acelera adecuadamente. ¿Es viable el proyecto? A Es imposible, no se conseguirá modificar las reacciones nonuales. B Teóricamente es viable. e Teóricamente sólo es posible evitar parcialmente la disminución de las fuerzas normales. D De hecho muchos automóviles van equipados con uno de estos dispositivos, E Es poco recomendable porque disminuirían simultáneamente las reacciones n0n11ales en las cuatro ruedas.
- 21. ., " 266 TEOREMAS VECTORIALES s.e 8,41 En un automóvil equipado con un dispositivo antiblocage de los frenos (ABS), cuando se frena con la máxima intensidad las ruedas se hallan justo en el umbral de deslizamiento pero sin traspasarlo. Si el coeficiente de rozamiento jl=O,S es el mismo en las ruedas delanteras que en las traseras y la inercia de las ruedas es despreciable, ¿cuál es la fuerza normal de enlace en el conjunto de lus ruedas traseras en condiciones de frenada máxima? A 0,2 rng B O e 0.5 mg D 0,4 rng E 0.3 mg 8.42 Un motorista acelera haciendo patinru· la rueda motriz ~que tiene momento de inercia Ir- manteniendo un ángulo de inclinación a. constante de la moto. La rueda delantera puede girar libremente y se consideran despreciables las demás inercias a la rotación. Si durante un cierto tiempo de este proceso la rueda motriz tiene una aceleración angular positiva, ¿qué se puede afirmardc:l valor del coeficiente de rozamiento rueda~suelo? A B e D E = tg 8 > tg e < tg9 = ctg e Habria que conocer la relación de transmisión. 8.43 Uno. placa cuadrada y homogénea de lado L está articulada en O y mantenida en reposo con el lado OP en posición horizontal mediante el hilo QP. Si se corta el hilo, ¿cuál es el valor de la componente 1 de la fuerza de enlace en Oque la placa transmite a la pared justo después de cortarlo? A B e D E O (3/4-12)mg -(3/4.J2 )mg (3/8)mg -(3/8)mg 8.44 En el sistema de la figura, el bloque está unido al suelo mediante las barras de masa despreciable PP' y QQ' que tienen articulaciones de eje perpendicular al plano de la figura en sus extremos. Inicialmente el hilo OP' mantiene el sistema en reposo. Si en Un cierto instante se corta el hilo, ¿qué aceleración adquirirá G? A B e D E o o g sen 80 g sen 80 (1+h/s) g sen 80 (1 +hlL) g sen 90 L21(L+hcos8) P Q R S T 8.e CUESTIONES 267 8.45 El sólido de la figura avanza con celeridad v sobre un pl:J.no horizontal liso. La dirección normal al plano del movimiento es central de inercia. ¿Qué se puede decir sobre el valor de la reacción nonnal en P en el instante en que Q justo pierde contacto con el plano? A Sigue valiendo mgl2 B Pasa a valer rng C Siempre aumenta D Siempre disminuye E Pasa a tener UD valor comprendido entre O y mg que depende de la geometría de masas. 8.46 Un individuo practica el "puenting" en un puente de 15 m de anchura y COll una cuerda de 25 m de longitud. Se lanza desde P sin velocidad inicial atado a un extremo de la cuerda. El otro extremo está fijado en Q. Se observa que justo después de quedar tensada la cuerda por primera vez el individuo sale con velocidad horizontal. ¿Cuál es el módulo de esta velocidad tn m S-I? (g=lOm s-:!). A B e D E 20 22,4 o 16,8 15 8.47 Un anillo delgado y homogéneo se lanza tangencialmente sobre el suelo con movimiento de translación de velocidad vo.¿Cuánto tiempo tarda en dejar de patinar a causa del rozamiento? A B e D E 2 "ol)lg 3 vo/2 llg vo/)lg vo/2 J..lg vo/3 )lg 8.48 El conjunto bicicleta-ciclbta sube la pendiente de manera que la velocidad de su centro de inercia G y su momento cinético GK son constantes. ¿Cuál es la recta que limita la posición del centro de inercia G para que la rUtda delantera no pierda contacto con el suelo? A B e D E S R Q T P
- 22. I [ I I I t~·•...'" .' , 26 BTEOREMAS VECTORIALES 8.C 8.49 Un utletuestá haciendo un salto de longitud. Si se desprecia la interacción con el aire, . qué se puede afirmar de la posibilidud que tiene de modificar el movimiento de su centro de inercia y la orientación del tronco, considerado como sólido rígido, mediante el movimiento cíclico de brazos y piernas? A B e D E Puede modificar independientemente ambas cosas. Puede modificur umbas cosas, pero no de manera independiente. Sólo puede modificar el movimiento de su centro de inercia. Sólo puede modificar la orientación del cllerpo. No puede modificar ninguna de las dos cosas. ~g 25 8.50 La barra PQ está en equilibrio estático. El extremo P está unido al hilo OP y el extremo Q se apoya sobre la pared vertical qq' con rozamiento. ¿Qué valor mínimo ha de tener el coeficiente de rozamiento entre barra y pared? p A B e D E 2 0,5 ° 8.51 En el sistema de la figurn, ¿cuál es el mínimo coeficiente de rozamiento ).1 entre el rodillo y la pared para que con una fuerza F adecuada se pueda mantener el rodillo en reposo? A B e D 0,5 ¡ 2 E No es posible mantener el rodillo en reposo. 8.52 Una escalera descansa sobre el suelo en P y contra la arista en O. El rozamiento entre escalera y arista es despreciable y entre la escalera y el suelo es de coeficiente Il>tana. ¿Puede la persona superar el punto de apoyo O sin que se pierda la estabilidad? A No, la escalern. perderá el contacto en P cuando el operario sobrepase O. B No, la escalera deslizará en P, sin perder contacto, cuando el operario sobrepase O. e Sí, pero jo escalera perderá el contacto en P cuando la vertical del G del sistema operario-escalera sobrepase la del punto O. D Sí, pero la escalera deslizará en P cuando la vertical de G del sistema operario-escalera sobrepase la de O. E Sí, Y la escalera ni desliza ni pierde contacto en P aunque la vertical de G del sistema opernrio-escalera sobrepase una ciertCl distancia ICl vertical de O. ~g 2L ~~d~ cilindro ) hOidráulico .-! 8.P PROBLEMAS 269 8.53 El sistema de la figura está en reposo permanente. El rozamiento entre la rulina y su eje y en la articulación O son despreciables. ¿Qué fuerza ejerce el cilindro hidráulico en esta posición? A (mgUs)/cosa B (mgUs) cos·1a. e (mgUs) cosa. D (mgUs) cos2a. E (rngUs)/cos:;a 8.54 La cuña de la figura puede deslizar sobre el plano horizontal con coeficiente de rozamiento 11=0,7. Si se empuja a partir del reposo con la barra horizontal que tiene una rulina en su extremo, ¿a partir de qué fuerza F empieza el deslizamiento?: A B e D E >0,7 rng >0,35 mg >1,4 rng >0,35 ·/3 mg No se inicia el deslizamiento por muy elevada que sea E 8.55 Para un sistema mecánico de n grados de libertad y r incógnitas escalares relativas a componentes de torsores de enlace. los teoremas vectoriales permiten haHar q ecuaciones escalares independientes, con q«n+r). Se puede decir que: A El sistema es indeterminado, no se pueden obtener ni las ecuaciones del movimiento ni las componentes de las acciones de enlace. B A pesar de tener menos ecuaciones que incógnitas, el principio de la determinación establece que siempre se pueden determinar todas las incógnitas. e Se pueden determinar las acciones de enlace pero no las ecuaciones del movimiento. D Se pueden determinar las ecuaciones del movimiento, pero las acciones de enlace resultan todas indetenllinadas. E Se pueden determinar las ecuaciones del movimiento. La indetenninación se refiere a las incógnitas de enlace, aunque no necesariamenLe son todas indeterminadas. 8.P PROBLEMAS --<>F -r'""f+'ill-"'<~~l--~-l R 8.1 La rueda de la figura, de superficie exterior cilíndrica y centro de inercia que coincide con su centro, rueda sin deslizar sobre un plano horizontal empujada por la fuerza F. Esta fuerza actúa mediante un hilo enraBado sobre el tambor de radio r sin que deslice sobre él. Determinar: l. La aceleración x. 2. La componente 1 de la fuerza de enlace en J. Estudiar la tendencia de J a deslizar en función de la relación adimensional )dd(mrR).
- 23. 270 TEOREMAS VECTORIALES 8.P ¡" ¡I~ , k' 8.2 Un rodUlo macizo y un homogéneos están inicialmente en sobre un plano inclinado. El coeficio:nte rozamiento !l con el plano es el mismo los dos sólidos. ¿Cuál de los dos baja mayor aceleración? Estudiarlo en función In inclinación a y de )l. 8.3 El bloque de masa M del sistema de la figura d~sliza sobre el plano inclinado y el rodillo macizo, homogéneo y de masa m, rueda sin deslizar manteniendo contacto con el bloque. El rozamiento entre las sLlperficies en contacto es seco de coeficiente -valor que cumple los requisitos del mc,virniento descrito-o Determinar la aceleración bujada del conjunto. 8.4 El sistema de la figura está [o,:m:,de,' por un rodillo que rueda sin deslizar sobre un plano inclinado. Ln polea de radio r es solidaria al rodillo y sobre ella se enrolla sin deslizar el hilo unido al muelle, de constante k, que se mantiene paralelo al plano inclinado. Para x=O el muelle no tiene tensión. Determinar: l. La eco del movimiento para la coord. X. 2. La posición de. equilibrio xe y la frecuencia de las oscilaciones a su alrededor. 3. Lo. fuerza de rozamiento para la posición de equilibrio. ¿En qué posición xmú.... o xmln se presenta el máximo riesgo de deslizamiento? 8.5 El rodillo de la figura, macizo y homogéneo, rueda sin deslizar sobre un soporte serniciHndrico fijo de eje horizontal. Determinar: l. La ecuación del movimiento. 2. El ángulo 8e para el que se pierde el contacto si 11=00 y el rodillo parte del reposo en )a po~iS'ión 80, (Se sugiere sustituir 8=8d8/de e integrar la ecuación resultante en derivadas separadas para hallar é(8». 3. El ángulo ee para el que se inicia el deslizamiento si )1=1/7 y el rodillo parte del reposo en la posición 80, R 8.P PROBLEMAS 271 8.6 El bloque homogéneo rueda sin deslizar sobre un soporte semicilíndrico de eje horizontaL Para 8=0 el centro del bloque está sobre la vertical de O. Determinar: l. La ecuación del movimiento. 2. La existencia de posiciones de equilibrio -1t/2S8..:S11:12, distintas de 8(:;::;0. 3. La condición para que 8(:=0 sea una posición de equilibrio estable y> en este caso, la frecuencia de las pequeñas oscilaciones a su alrededor. 8.7 En el sistema de la figura, que se denomina péndulo de Salomón, el rodillo es macizo y homogéneo, y no desliza sobre la pista cilíndrica que gira con .Q cte. alrededor del eje, perpendicular al plano de la figura, que pasa por O. Se desprecia la intervención de 1<1 gravedad. Determinar: l. La eco del movimiento para la coord. e. 2. La frecuenci<1 de las pequeñas oscilaciones del rodillo alrededor de la posición 6=0. 8.8 Para determinar el momento de inercia axial le de una rueda de superficie exterior cilíndrica de radio R, de masa M y que está equilibrada estáticamente se propone el montaje siguieme: se añade una masa puntual m a una distancia s del centro de la rueda y se mide el período T de las pequeñas oscilaciones del movimiento de rodadura sin deslizar sobre el suelo horizontal. Detennino.r le a partir del valor de T y de los parámetros conocidos. (Nota: Se recomienda hacer el planteamiento vectorial del problema considerando la rueda y la partícula como cuerpos distintos unidos mediante fuerzas de enlace). 8.9 El rodillo macizo y homogéneo de masa ro de la figura rueda sin deslizar sobre el plano horizontal empujado por el soporte móvil, que se mueve con aceleración a. Entre el soporte y el rodillo hay rozamiento seco de coeficiente )-l. J. Determinar con qué fuerza horizontal F el soporte debe empujar el rodillo. 2. Determinar la fuerza de enlace que d rodillo recibe del suelo. 3. ¿Huy algún límite para el valor de J-l por encima del cuo.l no sea posible el movimiento descrito?
- 24. 2h 272 TEOREMAS VECTORIALES 8.P R 8.10 En el sistema de la figura el rodillo, que es homogéneo, se apoya sobre la pared vertical con un coeficiente de rozamiento !.L El hilo QP tiene el extremo Q fijo sobre el rodillo. Determinar: 1. ¿Para qué valor !lc del coeficiente de rozamiento el dispositivo queda bloqueado de manera que no empieza a deslizar por grande que sea la masa m? 2, Si ]1<!lc' ¿para qué valor me de m empieza el deslizamiento? 3. Si fl<Jlc Y rn>mc' ¿con qué aceleración baja el bloque? 8.11 El bloque de la figura, que es homogéneo, está soportado horizontalmente mediante los dos rodillos. Los rodillos, impulsados por motores, giran en el mismo sentido con una velocidad angular O) tal que O)f>I*I. de manera que en P y Q siempre hay deslizamiento en el mismo sentido. Entre los rodillos y el bloque hay rozamiento seco de coeficiente 11 en P y ~t' en Q. Detemlinar: 1. Les fuerzas normales de enlace que el bloque recibe en P y en Q. 2. La ecuación del movimiento para la coordenada x. 3. La posición de equilibrio xe del bloque y la frecuencia (UD de las oscilaciones alrededor de la posición de equilibrio. Estudiar xe y COo en función de la relación entre]1' y !l. ~g 8.12 El b!oquedel sistema de la figurase mueve empujado por la polea que gira con velocidad angular ro constante, de manera que el punto P de contacto siempre desliza. Ln rueda en la que se apoya Qes de inercia despreciable. Determinar: l. La ecuación del movimiento para la coordenada x. 2. Los valores máximo y mínimo del coeficiente de rozamiento 11 pura que el bloque pueda permanecer en reposo. Para Jos valores L=O,5 m~ h::::O,2 m; 0:=21 ,8D; ]1=0.5 determinar: 3. La posición de equilibrio xc· 4. La frecuencia, en Hz, de las oscilacioncs alrededor de la posición de equilibrio. 8.P PROBLEMAS 273 8.13 La placa en forma de triángulo isósceles es homogénea y tiene incoI1'oradas dos poleas que se apoyan sobre el soporte circular fijo situado en un plano vertical. En la proyección sobre el plano de la figura coinciden el centro de inercia G del triángulo y el centro O del soporte circular. Las poleas giran respecto a la placa -impulsadas por un accionamiento no representado en la figura- con las velocidades <p de sentidos opuestos indicadas. El valor de <p es suficientemente elevado para garantizar que el deslizamiento en P y Q. entre las poleas y el soporte, tenga siempre el mismo sentido. independientemente del movimiento de la placa al variar el ángulo 8. Entre las poleas y el soporte hay rozamienlo seco de ;, ,.' ; l' .' coeficiente flp en P i JlQ en Q. Son despreciables las masas de las poleas y de Jos elementos del accionamiento que las impulsa (no representado). Determinar: 1. Las fuerzas normales de enlace que las poleas reciben en P y Q. 2. La condición que han de verificaqlp y JlO para que no se produzca acuñamiento (que impediría el movimiento del sistema al no permitir el deslizamiento entre poleas y soporte). 3. El intervalo de valores de epara los que se mantiene el contacto de las poleas con el soporte. 4. La ecuación del movimiento para la coordenada eyla posición 8e de equilibrio. 5. Para flrJlO=fl, el período de las pequeñas oscilaciones alrededor de la posición de equilibrio 8=0. fuerzas de interacción con el aire 8.14 En el sistema de la figura, el soporte se traslada horizontalmente con vclocidad constante v. El sólido de masa m está articulado al soporte con eje horizontal, normnl al plano del dibujo, que pasa por O. El muelle actúa entre el punto p. fijo al soporte, y el punto Q del sólido, mediante el hilo que pasa por Q' y la polea auxiliar; para 9=0 el muelle está estirado con tensión To· El rozamiento en Q' y en las m1iculaciones, y la inercia de la polea son despreciables. El aire ejerce sobre el sólido las fuerzas indicadas en la figura. Detennlnar: l. La velocidad de traslación del soporte "o para la que el sólido deja de apoyarse en Q'. 2. La ecuación del movimiento. 3. El mínimo valor, kmill, de la constante k del muelle para que en V=Vo, la posición 8=0 sea estable. 4. Si To=O, k>kmin y v>vo, ¿cuál es la posición Se de equilibrio?
- 25. , 1 1 , c.' 'o i.r; I r. ¡-, ¡j', '1 1 , 274 TEOREMAS VECTORIALES 8.P 8.15 El sólido de la figura está constituido por una placa rectangular doblada a 90° y tiene masa m. El sólido se hace deslizar sobre un plano horizontal liso con el que siempre mantiene contacto únicamente en los puntos P. P' y Q. Determinar: l. ¿Cuáles son las reacciones normales en P, P' y Q en reposo,? 2. Cuando el sólido desliza libremente sobre el plano, ¿cuáles son las reacciones nom1ales en P, P' y Q? 8.16 En el sistema de la figura, la placa triangular homogénea de masa m puede girar libremente alrededor del eje horizontal ss' normal a su plano. El vértice P se apoya sobre una superficie lisa cilíndrica con normal en el punto de contacto que coincide con la dirección PQ. El eje ss' gira, arrastrado por la horquilla, alrededor del eje vertical fijo que pasa por O y P. Detenuinar, utilizando la base indicada cuando convenga, l. La fuerza de enlace y el momento de enlace respecto a O que la placa recibe de la articulación. (denominar N a la fuerza normal de enlace que la placa recibe en n 2.. El módulo de la fuerza normal de enlace que la placa recibe en P. ¿Cuál es la máxima velocidad de rotación que puede tener la placa para que mantenga contacto en P? 8.17 La placa rectangular homogénea está suspendida de una gr~a de la fom1a indicada en la figura. Inicialmente la placa está en reposo y~ dos operarios, actuando sobre los vértices P y Q, la hacen girar con velocidad anO'ular constante alrededor del cable, que se m:ntiene siempre vertical. Determinar, utilizando la base indicada cuando convenga, l. El momento resultante respecto al centro de la placa de las fuerzas que ejercen los operarios. 2. La fuerza que ejerce el operario que actúa sobre P. 3. La tensión del cable de la grúa. cable vertical 2' 2 ~g 8.P PROBLEMAS 275 8.18 La plac:! homogénea de la figura, que tiene forma de triángulo equilátero, está suspendida, por el punto medio O del lado horizontal QQ', de un cable vertical a través de una rótula esf¿rica. El vértice P se apoya sobre un plano horizontal con rozamiento seco de coeficiente ¡ ..l. El plano de la placa forma un ángulo a. con el plano del suelo. Dos personas actúan para mantener constante la velocidad angular no de la placa alrededor del eje vertical que pasa por O. La persona que actúa sobre Q' estira mediante una cuerda que mantiene horizontal y perpendicular al lado QQ'. La persona que actúa sobre Q aplica la fuerza (únicamente fuerza) necesaria para garantizar el movimiento previsto. Determinar: 1. El momento resultante respecto a O de todas las fuerzas que actúan sobre la placa. 2.' La fuerza vcrtical N que la placa recibe del suelo en P y la tensión T de la cUt:rda unida a Q'. 8.19 La placa del sistema de la figura, en forma de triángulo rectángulo, homogénea y de masa m, está unida por el vértice O al soporte móvil mediante las articulaciones de ejes e-e' y q-q'. La horquilla es de masa despreciable y entre ella y el soporte actúa un muelle torsional de constante k que para 9=0 no tiene tensión. Las resistencias pasivas en las articulaciones son despreciables. El vértice P desliza sobre el plano horizontal y entre él y el plano hay un rozamiento viscoso de constante c independiente de la fuerza normal. El soporte tiene movimiento de translación rectilínea con celeridad constante vo' Detemunar: l. La expresión de las compont:ntes de la 1, fuerza de fricción que actúa sobre la placa en P. 2. La ecuación del movimiento para el ángulo 9. 3. La expresión. en función de 8 y é, de la fuerza normal de enlace que la placa recibe del suelo en P. 4. El valor de Yo a partir del cual la rozomientoviscoso posiciól1 de equilibrio 96=0 pasa a ser constante e inestable.
- 26. 276 TEOREMAS VECTORIALES 8.P 8.20 La moto con esquematizada en la figura, que tres ruedas iguales, tiene el eje rued8 del sidecar avanzado distanciu s respecto al de la trasera. La moto descrita recorre g 9 curva con 8 constante y con ce.leI'idai:Í,,: del centro A de la rueda constante, sin que la rueda motriz rueda directriz (de centrO C) sobre el suelo. Se considera que rueda directriz y la del sidecar Son inercia ctespreciabley que sobre ou¡",ue",.;¡,,¡i'¡'¡i+:/iY,: actúa ningún freno ni fricción en el eje. El sidecar se esquematiza mediante la placa triangular delgada y homogénea ',i1~,):j/n¡ representada en la figura, y se considera que la su posición respecton! cuadro de la moto se mantiene constante. Detem1inar en función de v y 8: 1. La rotación y la velocidad derrape de la rueda del sidecar. 2. La descripción del sistema de fuerzas que hay que considerar, para 9>0, que las ruedas reciben del suelo en el planteamiento de los teoremas vectoriales al sistema moto-sidecar. 3. Determinar la re!'iultante del sistema de fuerzas de enlace que el sidecar recibe de su sopone. 4. Determinar cl momento resultante, respecto al punto Q, del sistema de fuerzas de enlace quc el sidecar recibe de su soporte. o ete 8.21 En el sistema de la figura, los extremos P y Q de la barra deslizan sin rozamiento sobre el soporte circular. Éste gira con velocidad angular Q constante alrededor de su di.ámetro vertical que es fijo. El ángulo POQ es de 120°. Determinar: l. La ecuación del movimiento para la coordenada 8. 2. Las componentes, normales al plano del soporte de las fuerzas de enlace que la barra recibe en P y en Q. 3. El par motor necesario por garantizar .o. constante. 8.P PROBLEMAS 277 '''Vyorjp g~atorio 8.22 En el sistema de la figura, el sólido rígida de masa m es plano. contenido en el plano 2-3, y simétrico respecto al eje 3. Este sólido puede girar sin rozamiento alrededor del eje 1 respecla al soporte giratorio.El soporte gira con velocidad angular constante Q alrededor del eje vertical que pasa por O, gue es fijo. Detemúnar: 3 l. La ecuación del movimiento para la coordenada e. 2. Las componentes, en la base indicada, del momento de enlace en O que el sólido recibe del soporte. 3. El par matar necesario p1lra gamntizar.Q constante. 4. Ln estabilid1ld de la posición 9=0. diámetro ( horizontal ~~---"- 1= l' 'l' .~ dirección horizontal fijo 8.23 El sólido rígido de la figum está compuesto por un anillo y una partícula P situada sobre el eje del anillo, ambos de masa m. Los elementos de unión son de masa despreciable. El punto O del sólido está fijado mediante U01l rótula esférica de centro O y el anillo mantiene contacto con deslizamiento con el plano horizontal fijo. Entre el anillo y el plano hay rozamiento seeo de coeficiente 1.1. Las otras resistencias pasivas son despreciables. Determinar pa¡~ 1j!>O y 'Í'>O: 1. La fuerza resultante y el momento resultante en O del sistema de fuerzas que recibe el sólido en función de O/, cp y sus derivadas. (Se sugiere utilizarla base 113 en el Teorema de la Cantidad de Movimiento, y la base 1'2'3' en el Teorema del Momento Cinético). 2. Las ecuaciones del movimiento para las coordenadas I.V y <p, así como la fuerza normal en Q. 8.24 A parti~ de un cierto instante, el sólido del problema 8.23 deja de desli~rsobre el p~ano.. ~l rozamiento entre el anillo y el plano es nulo en la dirección radial pero es suficiente en la d¡reCClon tangencial para evitar el deslizamiento. Detenninar: 1. La ley de la celeridad '(t) de P. 2. Lns componentes en la base 123 de las fuerzas de enlace que el :mil!o recibe en Q y en Q.
- 27. ~,':. eje ¡e, 1',. , , I~;; f" L, l,'; ~..: • 1'< : 1;;,: ¡,~ t;;~ f : Ii,j • ",'1 ""1 t:" ~:l ~'i' t" l'", ; h f , l.:i ¡,;. Il : í'~ ¡~l ¡ ! i " ! 1::, 1:, t::.,! ¡.~:; 278 TEOREMAS VECTORIALES S.E 8.E ENIGMAS 8.25 En el mecanismo repre",",.d; en la figura, el sólido C~~:~~~~~'~!~;, cilindra con un brazo está Q al soporte respecto al girar libremente alrededor del s,oporte es solidario al eje que gw' can} 6 constante, La masa del soporte rozamiento en las articulaciones despreciables. Determinar: l. La ecuación del movimiento para coordenada cp. 2. Las componentes, en la base 1'2' 3' de la fuerza de enlace que el Drazo "~,e, recibe del soporte. 3. El par motor que actúa ~obre el giratorio para mantener 6 Constante. ::,!'~l,~,:'l!,¡!i:i' 1 4 . Si se prescinde de la gravedad g, :, ¿cuál es la frecuencia de las pequeii.as oscilaciones alrededor de cp=O? 8.1 El enigma de la barca y el barquero: Inicialmente barca y barquero El barquero quiere bajar están en reposo. La barca y al avanzar a lo largo de toca el muelle y el barquero la barca ve que ésta se está en la popa, desplaza hacia atrás. Cuando llega a la proa se detiene y ve que la barca también se para pero demasiado lejos del muelle para bajar. ¿Podrá bajar sin pedir auxilio o recorrer a los medios de propulsión de la barca (motor, remos, vela)? S.E EN)GMAS 279 u. El "soka-tira" del País Vasco es la clásica competición de dos equipos que tiran de una cuerda y gana el que consigue arrastrar al otro. Si la masa de la cuerda es despreciable, la fuerza conjunta de cada equipo sobre la cuerda tiene el mismo valor. Entonces...¿por qué unos ganan y otros pierden? 8.3 El enigma de la hélice de tres palas: En la primera época de la aviación las hélices eran de 2 palas (y aún lo son en las avionetas). Pero más adelante se prefirieron las hélices de 3 palas. ¿Encuentras alguna justificación mecánica (no aerodinámica) para ello? 8.4 El enigma de las oscilaciones de una escuadra: ~g no oscila bién Una escuadra se suspende de uno de sus vértices agudos, en torno al cual puede girar libremente. A partir del reposo en la posición de equilibrio representada, se observa que puede oscilar bien alrededor del eje horizontal perpendicular a la escua- dra, y que no oscila bien alrededor del eje horizontal contenido en su plano. ¿Qué justificación encuentras para ello?
- 28. 280 TEOREMAS VECTORIALES S.E gma de las curvas en moto: ¿En qué sentido debes empujar el manillar para entrar y salir de la curva? CAPíTULO 9 TEOREMA DE LA ENERGíA El teorema de la energía, al referirse a una magnitud -fa energfa- que también se define en otras ramas de la física -electricidad, termodinámica, fisicoquímica, ...- hace de puente de unión entre la mecánica y el resto de la física. Introduce los conceptos nuevos de elIerg{a cinética y energfa pOlel1cial, y de trabajo)' potencia realizados por Ulla fuerza. Tiene un cierto paralelismo con los teoremas vectoriales, porque también evalua el cambio de una magnitud asociada a un sistema mecánico -la energía cinética- mediante una magnitud asociada a las fuerzas -el trabajo realizado por éstas-, aunque, mientras los teoremas vectoriales conducen a una integración en el tiempo de las fuerzas y sus momentos, el teorema de la energía conduce a la integración de las fuerzas a lo largo de la trayectoria del punto de aplicación, es decir, a la integración en el espacio. Sin embargo hay diferencias significativas respecto a los teoremas vectoriales. Las magnitudes que relaciona son escalares en lugar de vectoriales, cosa que atenua las dificultades derivadas del uso de bases vectoriales. Otra diferencia notable es que la intervención de las fuerzas interiores, en principio, no es nula como en los teoremas vectoriales. Ello hace que la aplicación del teorema de la energía sea más delicada que la de los vectoriales por el riesgo de olvidar la participación de alguna fuerza interior. El teorema de la energía suele utilizarse para la determinación de las magnitudes que le son específicas: cambios de energía cinética, trabajo y potencia de las fuerzas, aunque en sistemas de un único grado de libertad constituye un método alternativo para hallar la ecuación del movimiento. Sin embargo, a diferencia de los teoremas vectoriales, el teorema de la energía no es adecuado como método general para hallar las ecuaciones del movimiento y fuerzas de enlace en sistemas de varios grados de libertad. A causa de esta utilización distinta, el teorema de la energía se aplica preferentemente en forma integrada. 281
- 29. f::I·! ~.. : 282 TEOREMA DE LA ENERGiA 9.1 9.1 EL TEOREMA DE LA ENERGíA. ENERGíA CINÉTICA. TRABAJO y, POTENCIA DE LAS FUERZAS Para un sistema de materia constante, el teorema de la energía establece que incremento finito de su energ{a cinética TR.G~I(sist) en una referencia galileana, dos estados 1 y 2 del sistema, es igual al [mol/jo ::Esis(WR.G:lI[F(P)] que las fuerzas actúan sobre las partículas realizan a lo largo de las trayectorias de éstas R.Gal Flg. 9.1.1 SiSI sistema de materia ele trayectoria j de Pen R (1) con TR.G,' (sist) '" L:..I,m p v~.G,' (P), (2) SiSl2 . , WR.G,' [F(P)1'"cjiF(P) ds R.G,' (P), (3) donde f es la integrai curvilínea a lo largo de la trayectoria de P y dS R.G" (P) '" V R.Gol (P)dt. (4) El trabajo de una fuerza en una referencia es pues la circulación del vector fuerza a lo largo de la trayectoria, relativa a la referencia, recorrida por la partícula sobre la que actúa. Las Ecs.(2) y (3) ponen de manifiesto el carácter relativo a la referencia tanto de la energía cinética como del trabajo de las fuerzas. A diferencia de los teoremas vectoriales, en el teorema de la energía intervienen, en principio, las fuerzas interiores porque el valor de su trabajo no es necesariamente nulo, aunque globalmente es independiente de la referencia, Como se expone en la sección 9.5. oTo Demostración. Para cada panícula P del sistema, Fig,9.1.1, el producto escalar de los vectores que intervienen en la ecuación de la dinámica por el vector dSR.Gul(P)O;¡VR.Gul(P)dt conduce a m pa R.G,,' (P)v R.G,' (P)dt ~ ¿ F(P)· ds R.G,' (P). p En esta ecuación el término del primer miembro es el diferencial exacto m p3 R.Gul (P)v R.Gal (P)dt = m p v R.Gul (P)· dv R.GnJ (P) = ~ d[~mp v~.G,'(P)] '" dTR.G" (P). (5) (6) 9.2 DESCOMPOSICiÓN BAR1CENTRJCA DE LA ENEAG(ACINETICA 283 ·La· sustitución de la Ec.(6) en la Ec.(5) y la integración entre los estados 1y 2 establece para cada partícula · 2 2 ATR.G"' (P)J, ~ J¿ F(P)· ds R.G,' (P). (7) , p La Ec.(7) expresa el teorema de la energía cinética para una partícula. La Suma de esta ecuación para todas las partículas del sistema conduce a la Ec.(l). .;. Aunque usualmente el teorema de la energía se utilice en versión integrada, también se puede utilizar en versión instantánea. Por derivación temporal de la Ec.(l), previa sustitución de las Ecs.(3) y (4), se obtiene (8) sist ~iSI El producto escalar F(P)vR.GnJ(P) se denomina potencia de F(P), VI. en la R. Gal. Las ecuaciones (1) y (8) ponen de manifiesto otra diferencia significativa entre el teorema de la energía y los teoremas vectoriales. En el teorema de la energía no sólo la energía TR, sino también su cambio .ó.TR, o velocidad de cambio TR, son en principio distintas en dos referencias galileanas porque el trabajo o la potencia de las fuerzas lo son, En los teoremas vectoriales, D y OK (y de manera sim.i.larse; razonarla para BK y GK) son distintos en referencias galileanas distintas, pero Dy OK -o bien Lill y ~OK son independientes de la referencia galileana porque LsistFt:xt Yl:M<!Xl(O) lo son -o sus impulsos-o 9.2 DESCOMPOSICiÓN BARICÉNTRICA DE LA ENERGíA CINÉTICA R RTG sistema Flg. 9.2.1 La energía cinética de un sistema en una referencia R admite la descomposición baricéntrica, TR (sisl) ~ T,f (sist) +TRTG (sisl) '" ~TJr:JS(sist)+T:Ol(sist), (1) de manera que puede calcularse como suma de la energía cinética en R de tota la masa concentrada en el centro de inercia G del sistema -denominada energhl cinética de traslación del sistema- más la energía cinética del sistema en la referencia que se traslada con G respecto a R -denominada el1erg(a cinética de rotacióll del sistema. .;.Dernostracióu. Las velocidades de P en R yen la referencia RTG que se traslada con G, Fig. 9.1.1, están relacionadas mediante
- 30. 264 TEOREMA DE LA ENERGIA 9.3 (2) La sustitución de esta relación en el expresión de TR(SÍst) conduce a (3) En el segundo miembro de la Ec.(3) la primera suma es TRTG(sisr), la segunda es TR $(sist)' y la tercera es nula por la propiedad característica del centro de inercia (Ec.7.!.3). 9.3 EL TEOREMA DE LA ENERGíA PARA UNA REFERENCIA QUE SE TRASL'<;DA RESPECTO A UNA GALILEANA, TEOREMA DE LA ENERGIA PARA LAS ENERGíAS CINÉTICAS DE ROTACiÓN Y DE TRASLACiÓN R.Gal 1;;,(P)=-mp aR.Ga,(B) r--, sistema RTB Flg.9.3.1 Una referencia que se traslada respecto a una galileana es, en principio, no galileana a causa de la aceleración galileana de sus puntos, y al plantear en ella el teorema de la energía hay que considerar las fuerzas de inercia correspondientes. Ahora bien, al tratarse de un campo uniforme de fuerzas proporcionales a la masa de las partículas, el trabajo realizado por todas ellas es equivalente al de la resultante aplicada en el centro de inercia G. Así para la referencia RTB que se traslada con origen en B, Fig.9.3.l, el teorema de la energía toma la forma, T,ns (sist)l~ = ¿: WRTB [F(P)]; + WRTB [-(¿: m p)a R,G" (B)aplicada a O]'. (1) ~ , .r. Demostración. Las fuerzas de inercia se reducen a la fuerza de arrastre :T(P)=-mp3R,Gal(B). El trabajo resultante realizado por todas ellas es (2) 9.3 EL TEOREMA DE LA ENERGfA PARA UNA REFERENCIA QUE SE TRASLADA RESPECTO A UNA... 265 ",,""',' "pero a causa de la relación de velocidades VRTB(P)=VRTG(P)+VRTB(O), se verifica ds RTB (P) =ds RTG (P) + ds RTB (O). (3) La sustitución de la Ec.(3) en la Ee.(2) conduce a En el segundo miembro la primera suma es nula a causa de la propiedad característica del centro de inercia (Ec.7.!.3) y la segunda es igual al trabajo de la resultante de las fuerzas de inercia, -( L sist mp)aR.Gul(B), aplicada en G. .r. R.Gal Fig. 9,3.2 Teorema de la energía para la energía cinética de rotación. Si la referencia se traslada con G, Fig.9.3.2, el trabajo de la resultante de las fuerzas de inercia, -(2::sistITlp)aR,Gul(G), aplicada en G es nulo, de manera que en el teorema de la energía sólo intervienen las fuerzas de interacción. 6TRTG(Sjst)]~ =6Trt(sist)]~:::: = ¿: WRTdF(P)]]'. (5) 51St I Asípues, el incremento de energía cinética de rotación es igual al trabajo realizado en la RTG por el mismo sistema de fuerzas a considerar en la referencia galileana, aunque el trabajo realizado por cada fuerza es en principio distinto en las dos referencias. Teorema de la energía para la energía cinética de traslación. El incremento de la energía cinética de traslación en la R.Gal es igual al trabajo realizado, en la R.Gal, por la resultante de las fuerzas de interacción exteriores aplicada en G: LlTl~~~,(sist)l: = f[IF"I(P)].dSR.O"(G),, I Slst " WR.O" [IF"l (P) aplicada a oJ' SISt 1 (6) .;. Demostración. Se puede demostrar a pnrtir de In diferencia de las ecuaciones (9.1.1) Y (5), teniendo en cuenta la Ec. (9.2.1), o bien integrando la ecuación del Teorema de