Practica 1 Expresiones lógicas de PLC
•
0 recomendaciones•384 vistas

Este documento presenta 15 prácticas para el uso de controladores lógicos programables (PLC). Las prácticas cubren temas como expresiones lógicas, diagramas de escalera, tablas de verdad, temporizadores, contadores, comparadores, subrutinas y más. Cada práctica describe un escenario o problema de control y las instrucciones para desarrollar el programa PLC correspondiente y realizar la simulación.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Practica 1 Expresiones lógicas de PLC
Similar a Practica 1 Expresiones lógicas de PLC (20)
Más de SANTIAGO PABLO ALBERTO
Más de SANTIAGO PABLO ALBERTO (20)
Último
Último (20)
Practica 1 Expresiones lógicas de PLC
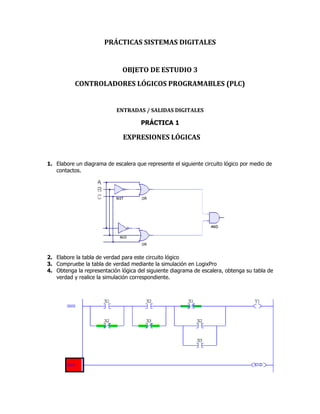
- 1. PRÁCTICAS SISTEMAS DIGITALES OBJETO DE ESTUDIO 3 CONTROLADORES LÓGICOS PROGRAMABLES (PLC) ENTRADAS / SALIDAS DIGITALES PRÁCTICA 1 EXPRESIONES LÓGICAS 1. Elabore un diagrama de escalera que represente el siguiente circuito lógico por medio de contactos. 2. Elabore la tabla de verdad para este circuito lógico 3. Compruebe la tabla de verdad mediante la simulación en LogixPro 4. Obtenga la representación lógica del siguiente diagrama de escalera, obtenga su tabla de verdad y realice la simulación correspondiente.
- 2. PRACTICA 2 APAGADOR DE TRES VÍAS MEDIANTE PLC I. Realice el programa de escalera para hacer un control tipo 3 vías (o apagador de escaleras) mediante el PLC II. Realice la simulación correspondiente III. Realice un diagrama que esquematice las conexiones físicas necesarias para la realización de la práctica, considerando que el PLC que se utilizará será un (1) PLC Micrologix 1000/1100/1500 IV. Documente los diagramas eléctricos y de conexión (al PLC)
- 3. PRÁCTICA 3 CONTACTOS Y FUNCIONES DE TEMPORIZADORES Y CONTADORES Los temporizadores tienen contactos y funciones a los que se puede acceder solo con direccionar el elemento deseado, describir el funcionamiento de cada uno de estos elementos. Realizar ejemplos en diagrama escalera en el simulador Logix PRO. EN TT DN PRE ACC Los contadores tienen contactos y funciones a los que se puede acceder solo con direccionar el elemento deseado, describir el funcionamiento de cada uno de estos elementos. Realizar ejemplos en diagrama escalera en el simulador Logix PRO. CU CD DN OV UN PRE ACC
- 4. ENTRADAS / SALIDAS DIGITALES PRÁCTICA 4 COMPARADORES I. Elabore un diagrama de escalera donde compare el acumulador de un temporizador “ON DELAY” y constantes definidos por el alumno para comprobar el funcionamiento de los bloques de comparación EQU, NEQ, LES, LEQ, GRT, GEQ II. Elabore el diagrama de tiempos y estados para esta secuencia III. Realice la simulación correspondiente.
- 5. ENTRADAS / SALIDAS DIGITALES PRÁCTICA 5 CONTADORES I. Se contará con un botón pulsador SW1 (I:0/0) normalmente abierto, el cual controlará el encendido y apagado de cuatro lámparas de acuerdo al número de veces que sea presionado, de acuerdo con la siguiente tabla: II. Elabore el diagrama de estados para esta secuencia III. Realice la simulación correspondiente.
- 6. ENTRADAS / SALIDAS DIGITALES PRÁCTICA 6 TEMPORIZADORES I. Elabore un diagrama de escalera que realice la siguiente secuencia de operación: 1. Se contará con un botón de Inicio (I:0/0) Normalmente abierto y un botón de Paro (I:0/1) Normalmente cerrado 2. Al presionar Inicio se encenderá una lámpara conectada a la salida O:0/0 3. 2 Segundos después se encenderá una lámpara (O:0/1), quedando encendida la primer lámpara. 4. 2 Segundos después se encenderá una tercer lámpara (O:0/2), quedando encendidas las dos primeras lámparas 5. Después de 2 segundos se encenderá una lámpara (O:0/3), quedando encendidas las tres primeras lámparas. 6. Las cuatro lámparas quedarán encendidas por tiempo indeterminado. 7. 5 segundos de haber presionado el botón de paro se apagará la cuarta lámpara, 2 segundos después la tercer lámpara, 2 segundos después la segunda lámpara y 2 segundos después se apagará primer lámpara. 8. En este momento el sistema deberá estar en condiciones de comenzar el ciclo de nuevo. II. Elabore el diagrama de tiempos para esta secuencia III. Realice la simulación correspondiente.
- 7. ENTRADAS / SALIDAS DIGITALES PRÁCTICA 7 LOGIXPRO DOOR SIMULATOR I. Realice la simulación del problema de control de cochera disponible en el software LogixPRO, bajo el nombre de “Door Simulation”. Las condiciones de operación están disponibles en el software. PRÁCTICA 8 LOGIXPRO TRAFFIC LIGHT SIMULATOR I. Realice la simulación del problema de control de tráfico de dos sentidos disponible en el software LogixPRO, bajo el nombre de “Traffic Light Simulator”. Las condiciones de operación están disponibles en el software.
- 8. PRACTICA 9 APLICACIÓN CONTADORES/TEMPORIZADORES I. Elabore un diagrama de escalera que realice la siguiente secuencia: Se desea controlar el arranque retrasado de un motor de corriente directa, pero primero deberá ser oprimida una clave con 3 interruptores para lograr que el motor arranque; el inicio del conteo se produce al oprimir el botón 1, después de esto tendrá 20 segundos para oprimir exactamente 3 veces el botón 2, 2 veces el botón 3 y 1 vez el botón 4, si se oprime el número correcto de pulsos en su botón correspondiente antes de que transcurran los 20 segundos se activará automáticamente una lámpara durante 8 segundos anunciando que el motor se pondrá en marcha, posteriormente arrancará el motor permaneciendo en funcionamiento durante 10 segundos y se detendrá permanentemente, si la clave no es correcta se encenderá una timbre durante 10 segundos para indicar que la clave es equivocada. Este timbre se apagara si se oprime el botón 1 antes de que transcurran los 10 segundos, para así introducir otra clave, estos 4 interruptores son N.A. Si se oprime el interruptor de paro u ocurre una sobrecarga, el motor y el proceso del conteo deberán detenerse instantáneamente; si el paro es por sobrecarga se encenderá una lámpara correspondiente mientras permanezca la falla. II. Elabore el diagrama de tiempos para esta secuencia III. Realice la simulación correspondiente
- 9. PRACTICA 10 USO DE INSTRUCCIONES MATEMÁTICAS I. Elabore un diagrama de escalera que realice lo siguiente: a) Conversión de temperatura de grados °C a °F y mostrar el resultado en el módulo de salida O:2 y en el módulo de salida O:6 b) Realizar diversas operaciones matemáticas entre los diversos registros de contadores y temporizadores (acumulador y preset) y visualizarlos en cualquiera de los módulos de salida del PLC II. Realice la simulación correspondiente en LogixPRO
- 10. PRÁCTICA 11 ACONDICIONAMIENTO DE SEÑALES E INSTRUCCIONES DE TRANSFERENCIA I. Mediante un botón pulsador asociado a la entrada I:0/0 del PLC, se incrementará el acumulador de un contador ascendente. II. Usando la función de transferencia MOV, transfiera el dato presente en acumulador del contador hacia el bloque de salidas del PLC en formato BCD (utilice salidas O:0/0 a O:0/4) III. Realice el acondicionamiento de señal necesario para que esta salida BCD pueda ser manejada por un convertidor BCD a display de 7 segmentos. IV. Un display de 7 segmentos deberá desplegar el número de pulsos que se ha dado al botón pulsador. Al llegar a diez pulsos, el contador deberá ser reseteado para que vuelva a desplegar el número cero de nueva cuenta. V. Realice la simulación correspondiente
- 11. PRACTICA 12 PROCESO NEUMÁTICO DE EMPAQUE DE PIEZAS En la figura siguiente se observa un proceso neumático de empaque de piezas, cuya secuencia de operación es como se explica a continuación: De acuerdo con las necesidades específicas de la empresa, el arranque, paro y operación nominal de la máquina es conforme a las siguientes especificaciones: ARRANQUE: Al principio de la jornada laboral se da por hecho que los cilindros A y B se encuentran en posición retraída. En caso contrario el operador deberá forzar al sistema a que logre estas condiciones, empleando las conexiones de pilotaje de las válvulas de control. Así, el inicio de la secuencia se da mediante la activación de un botón pulsador o enclavado. PARO: Cuando suceda un error, deberá existir un botón de paro de emergencia que detenga la máquina y la lleve al estado de reposo, dadas por las condiciones iniciales de operación. SECUENCIA DE TRABAJO: Una vez iniciada la secuencia, los cilindros A y B harán una repetición de tres ciclos y se detendrán, ya que en ese momento la caja de empaque quedará llena. El operador retirará el empaque lleno y él se encargará de reiniciar la secuencia de los cilindros mediante el botón de arranque.
- 12. PRACTICA 13 PROCESO DE ESTAMPADO DE PIEZAS SECUENCIA DE TRABAJO: En una fábrica se requiere automatizar un proceso de estampado. Para esto el actuador E sujetará la pieza a estampar, y el actuador D realizará el proceso de estampado, el tiempo de duración del actuador D sobre la caja será de 3 segundos. Finalmente, el actuador E liberará la pieza estampada. El sistema debe contar con un panel de control que consta de las siguientes opciones: a) Botón con enclave Selector Automático/Manual (SAM): este selector permite ejecutar el proceso de una forma automática o manual (modo paso a paso). b) Botón pulsador START: debe activar el ciclo automático y en el ciclo manual debe ejecutar sólo una fase del proceso. c) Botón pulsador STOP: detiene el proceso en modo automático al terminar el ciclo.
- 13. PRACTICA 14 PROCESO DE CLASIFICACIÓN Y EMPAQUE SECUENCIA DE TRABAJO: Un sistema de clasificación y empaque de productos capaz de diferenciar entre contenedores con material X y entre contenedores con material Y. el dispositivo de alimentación arrojará dos contenedores de material X y dos contenedores de material Y. Cuando sea material X, el cilindro F recorrerá sólo la mitad de su carrera y regresará de manera inmediata a su posición original. Después de esto, el cilindro G alimentará el contenedor 1. Si el producto es el contenedor con material Y, el cilindro F deberá hacer toda su carrera y regresar en forma inmediata a su posición de origen. Inmediatamente el cilindro H alimentará el contenedor 2. (No existen sensores que diferencien entre materiales) .
- 14. PRÁCTICA 15 USO DE SUBRUTINAS SECUENCIA DE TRABAJO: En esta práctica hará uso de subrutinas mediante las instrucciones JSR, SBR y RET con el fin de tener dos diferentes patrones de encendido de 3 lámparas. La primer subrutina encenderá instantáneamente las tres lámparas, un segundo después se apagará la primer lámpara, un segundo después de apagará una segunda lámpara y un segundo después se apagará la tercer lámpara. Después de esto se encenderán nuevamente las tres lámparas y el ciclo continuará así indefinidamente hasta que se elija la otra sub rutina. La segunda subrutina apagará instantáneamente las tres lámparas, tres segundos después encenderá la primer lámpara, tres segundos después se encenderá la segunda lámpara y tres segundos después se encenderá la tercer lámpara. Después de esto se apagarán nuevamente las tres lámparas y el ciclo continuará indefinidamente hasta que se elija la otra sub rutina. I. El programa principal solo constará de los renglones necesarios para hacer la elección de la subrutina que se desea elegir. II. El botón pulsador 1, elegirá una primer sub rutina. III. El botón pulsador 2, elegirá la segunda sub rutina.